Michael Batty和Pierre
Frankhauser等学者的研究表明,城市的生长遵循扩散限制凝聚(Diffusion-Limited
Aggregation, DLA)机制,这导致城市呈现出类似珊瑚或蕨类植物的形态。
而从美学角度来看,人类在进化过程中形成了对特定分形维数的偏好。Aesthetics
and Psychological Effects of Fractal Based
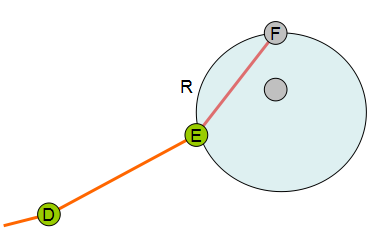
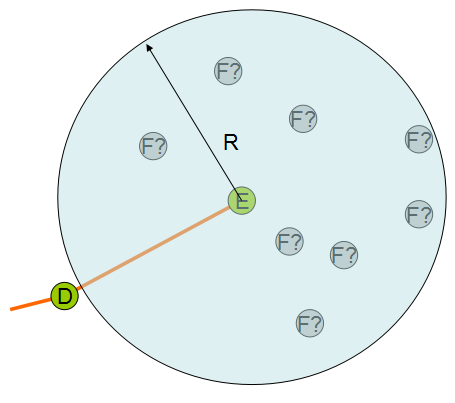
Design一文提到,自然景观(如海岸线、云层、树木)的 D 值通常在 1.3 到 1.5
之间。这一区间的图形被认为具有最高的视觉美感,能够引发观察者的“阿尔法波”共鸣,产生放松且专注的心理状态。因此,如果我们将这一指标迁移到城市PVP中,D ≈ 1.3 − 1.5
往往代表了一种兼具自然美感与功能秩序的“理想肌理”;过低(接近1)显得稀疏荒凉,过高(接近2)则可能导致感官过载或压抑。
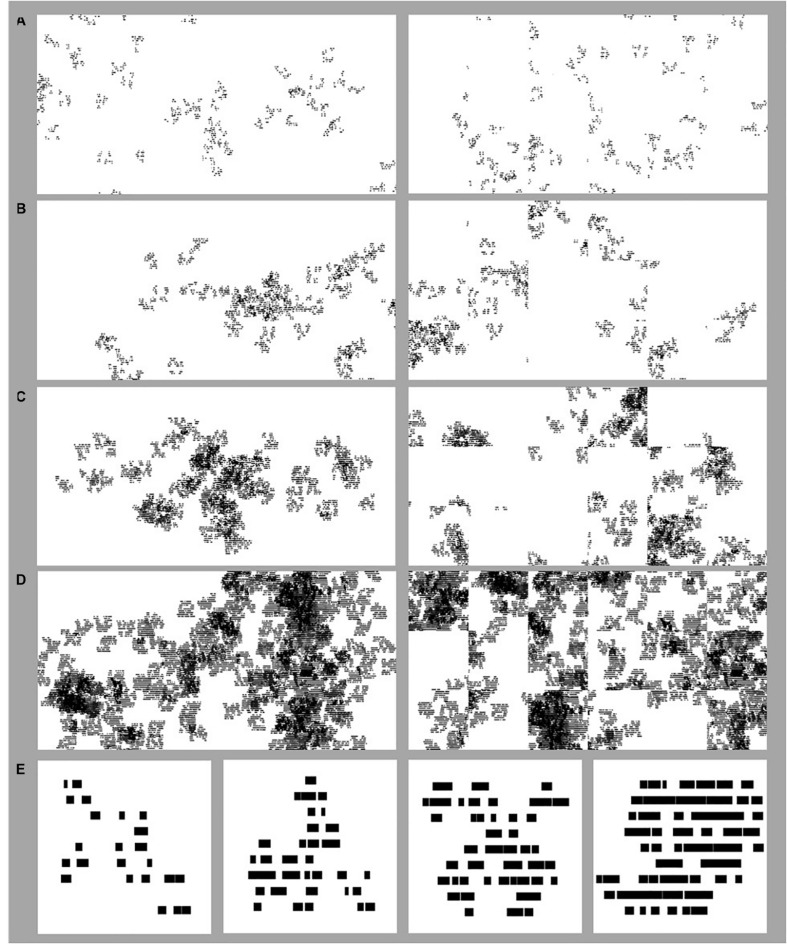
FIGURE 5
如图,代表了图案复杂程度从低到高
效果
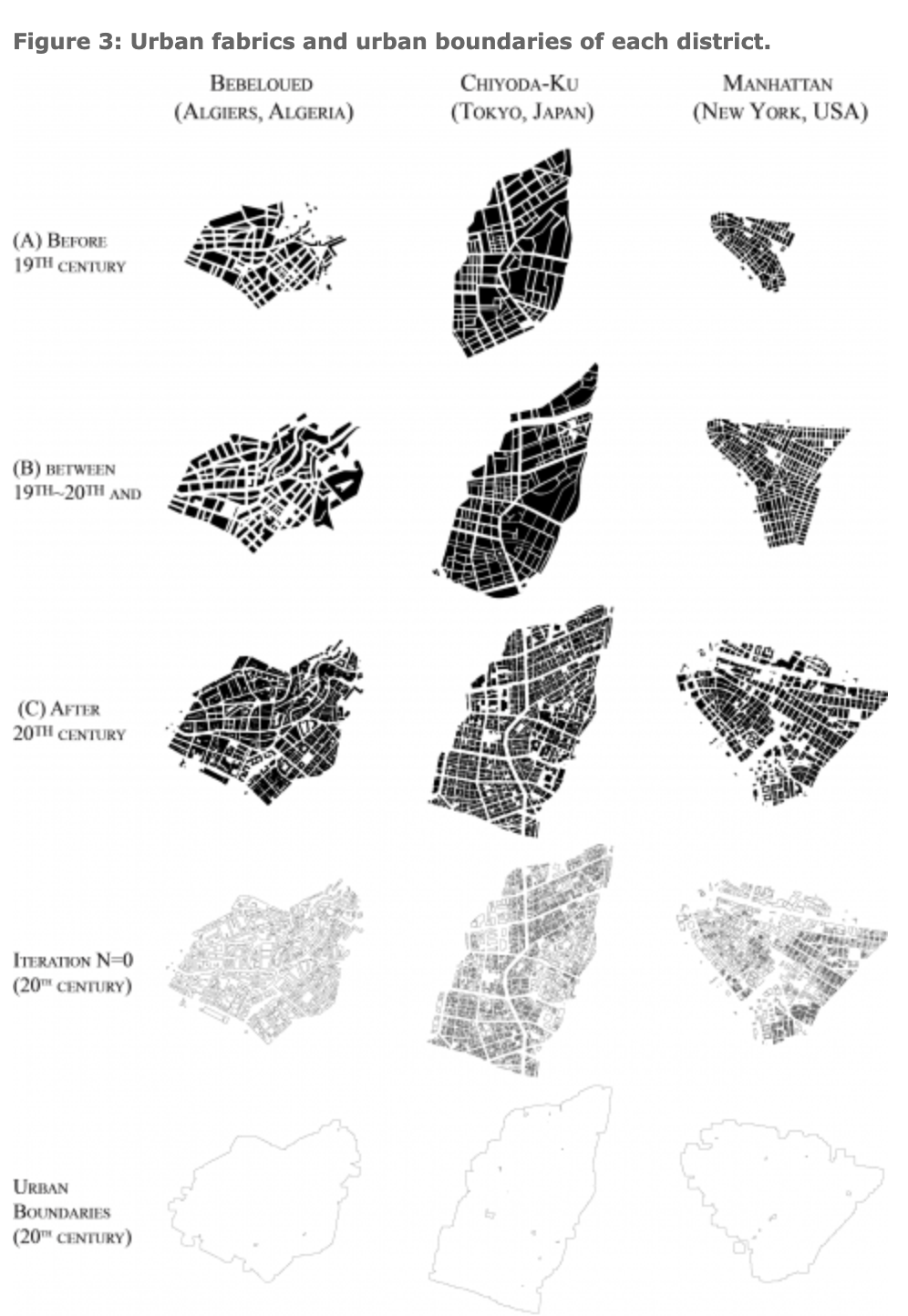
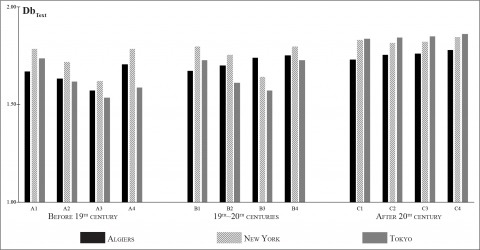
从这个角度出发,就可以利用这个方法对各个大都市进行测算
image-20251209202542920Figure 7: Fractal dimensions of urban
landscape images over time.
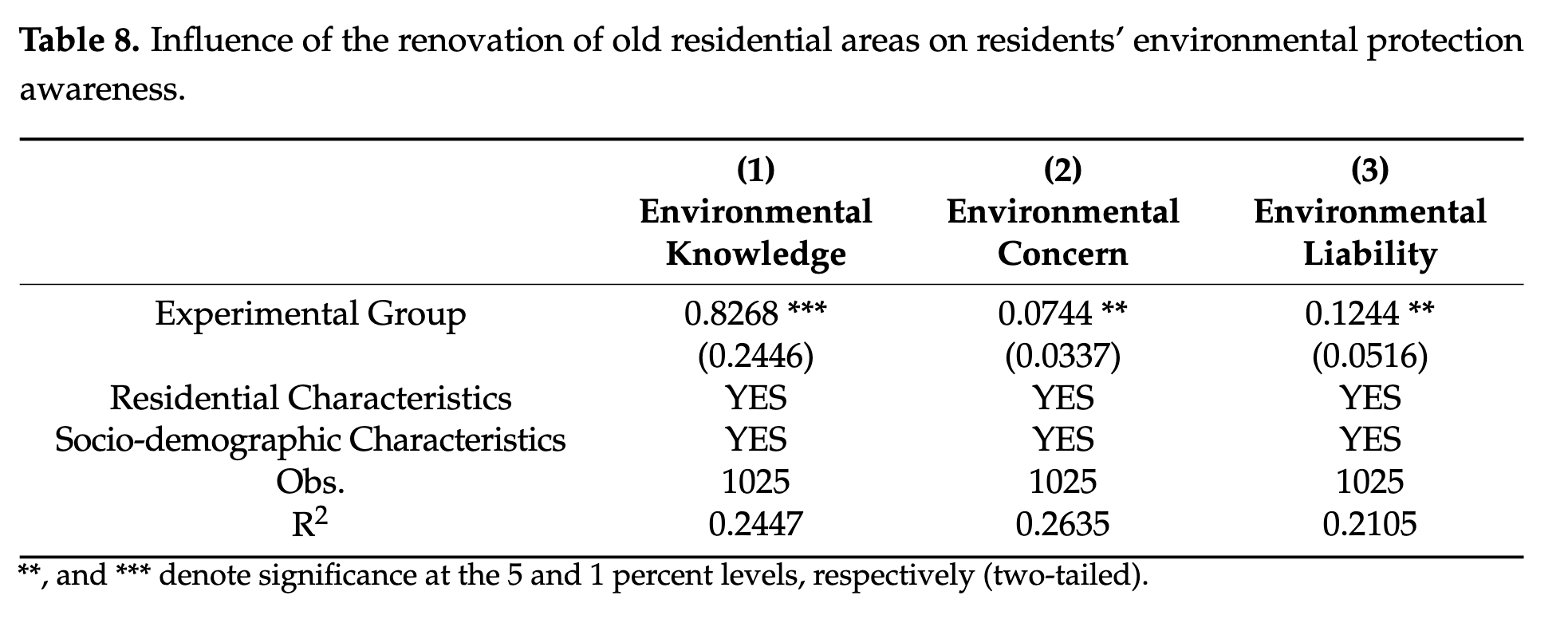
近年来,老旧住宅区改造越来越被纳入国家和城市层面的“城市更新”总体框架之中。基于成都老旧小区的数据,[He
等 2024][Urban Renewal and Transformation of Residents’
Pro-Environmental Behaviors: Evidence from the Renovation of Old
Residential Areas in Chengdu, China]
通过双重差分方法表明,老旧小区改造除了改善物质环境外,还显著促进了居民垃圾分类、节能等亲环境行为,其背后机制既包括环境基础设施的完善,也包括居民环境认知的提升。这说明老旧住宅更新已不再被视为单纯的“修缮工程”,而是承载着推动生活方式与行为模式转型的功能。
image-20251118182057051
图1 通过环境的改善提升的居民环保意识
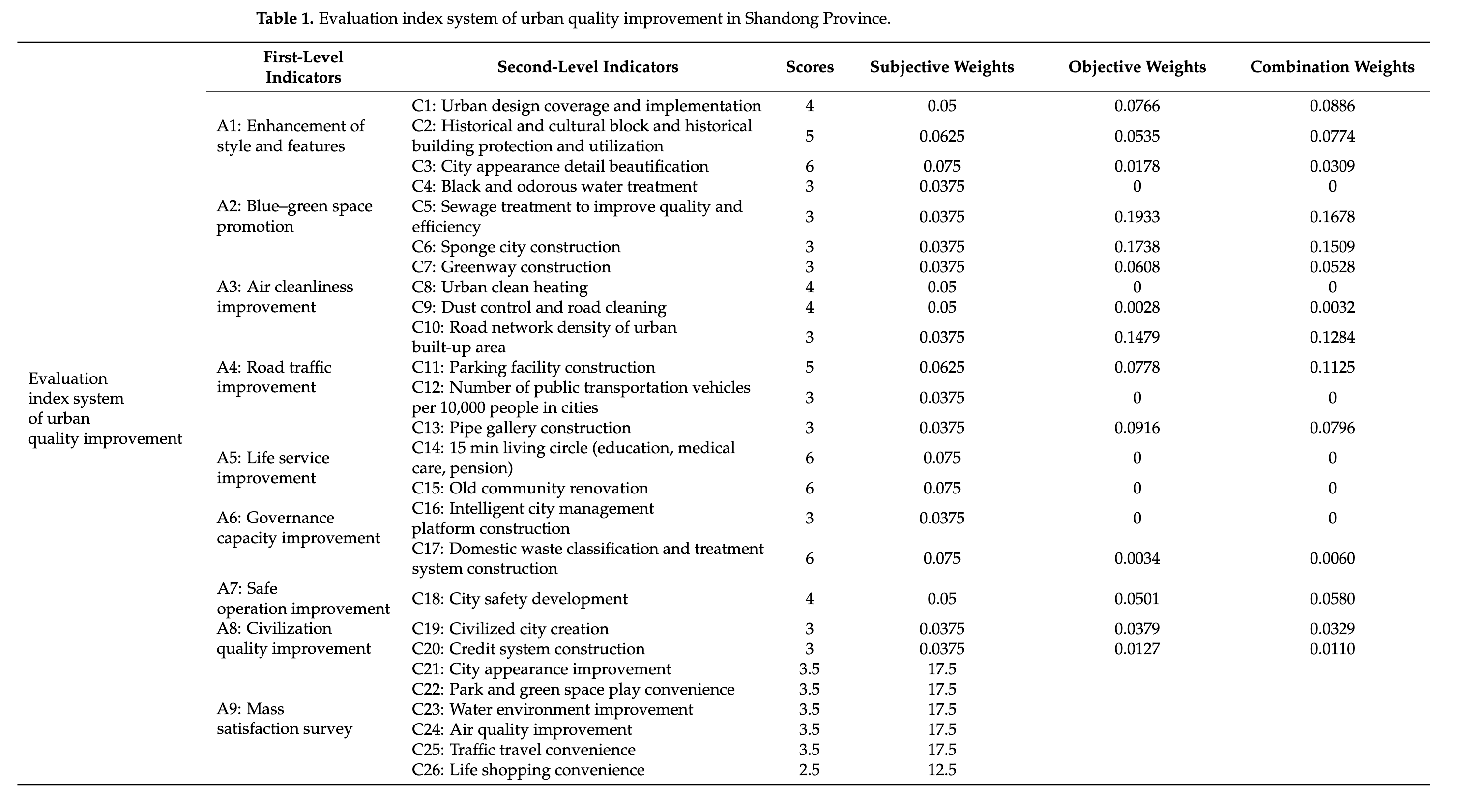
在更宏观的尺度上,[Liu 等 2024][Evaluation of Urban Quality
Improvement Based on the MABAC Method and VIKOR Method: A Case Study of
Shandong Province, China]
将老旧小区改造纳入城市品质提升评价体系,与交通、蓝绿空间、公共服务等指标共同构成城市更新绩效。这些研究虽然主要停留在城市与社区尺度,但为“为什么需要持续对老旧住宅进行改造”提供了政策与发展层面的依据——即老旧住宅更新被视为提升城市整体质量与居民福祉的重要抓手。
image-20251118182243704
图2
从指标角度可以看出,当前老旧住宅更新被视为城市整体质量与居民福祉的重要抓手
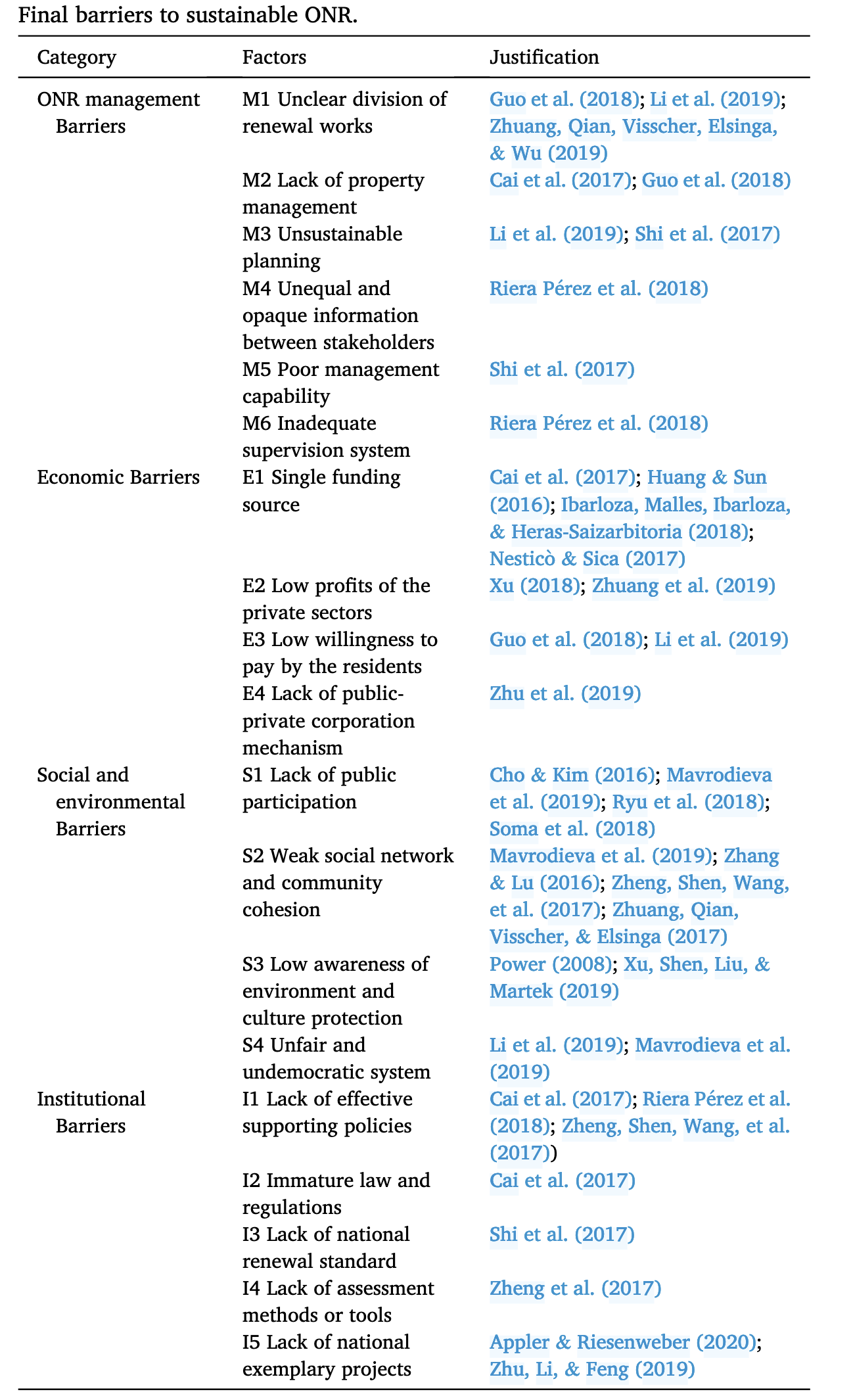
与此同时,对老旧社区“为什么难以持续改善”的反思也日渐增多。[Zhu 等
2020][The impacts of relationships between critical barriers on
sustainable old residential neighborhood renewal in China] 识别出 19
个障碍因素,并用模糊 DEMATEL 提炼出 13
个关键障碍,其中“缺乏有效配套政策”“公私合作机制缺失”“居民参与不足”等处于因果链的上游。[Shen
等 2024][Critical success factors and collaborative governance mechanism
for the transformation of existing residential buildings in urban
renewal: From a social network perspective] 和 [Zhang 等
2023][Collaborative Governance for Participatory Regeneration Practices
in Old Residential Communities within the Chinese Context: Cases from
Beijing]
则从社会网络与协同治理视角,揭示了多主体参与、资源协同和参与式更新在老旧住宅更新中的关键作用。
在城市更新从“物理整治”走向“综合治理”的过程中,居民满意度与使用体验逐渐成为评价老旧住宅改造成效的核心尺度。[Xu
等 2024][Resident Satisfaction and Influencing Factors of the Renewal of
Old Communities] 以赣州老旧社区为例,基于 CSI 与 PLS-SEM
构建居民满意度模型,指出居民对改造质量的感知是决定因素,而配套服务、公共设施和政府支持是关键影响因子,邻里情感与社区宣传则通过情感认同和信息渠道影响满意度。[刘
等 2021][Renovation priorities for old residential districts based on
resident satisfaction: An application of asymmetric impact-performance
analysis in Xi’an, China]
进一步基于“三因素理论”和非对称影响–绩效分析,将小区位置、基础设施、交通、小区管理、生活设施划分为“兴奋因素、绩效因素和基本因素”,提出差异化的改造优先级排序。
聚焦公共空间,[Chen 等 2024][Exploring Public Space Satisfaction in
Old Residential Areas Based on Impact-Asymmetry Analysis]
在合肥老旧社区发现,相比物理环境,不文明行为、空间占用、卫生状况等社会环境因素对公共空间满意度影响更大,且同样呈现出非线性特征。这些研究共同指向一个趋向:老旧社区更新的评价从“设施是否有”转向“空间是否真地好用、好走、好待”。
“好用、好走”与“可达性”密切相关,尤其对老年人、儿童、残障人士等弱势群体。[Guo
等 2018][The improvement strategy on the management status of the old
residence community in Chinese cities: An empirical research based on
social cognitive perspective]
表明,业主对社区管理成效的预期和硬件设施质量是其参与社区管理的关键前因;[Guo
等 2024][Enhancing Elderly Well-Being: Exploring Interactions between
Neighborhood-Built Environment and Outdoor Activities in Old Urban Area]
则在老旧城区中证明,超市、地铁、公交、医院等的可达性和道路条件显著影响老年人的身体健康和社会活动。
与本文研究主题高度相关的是,老旧住宅更新中的无障碍与垂直可达性改造。[Dai
等 2022][The Spatio-Temporal Pattern and Spatial Effect of Installation
of Lifts in Old Residential Buildings: Evidence from Hangzhou in China]
以杭州为例,发现加装电梯在空间上呈“由中心向外围扩散”的格局,且存在明显的空间溢出效应,邻近小区的加装行为会正向影响本小区的安装概率。这说明“可达性提升”(如电梯、坡道、适宜的走廊与门洞宽度)不仅改善个体建筑的使用性,还有“示范扩散”的社会效应。
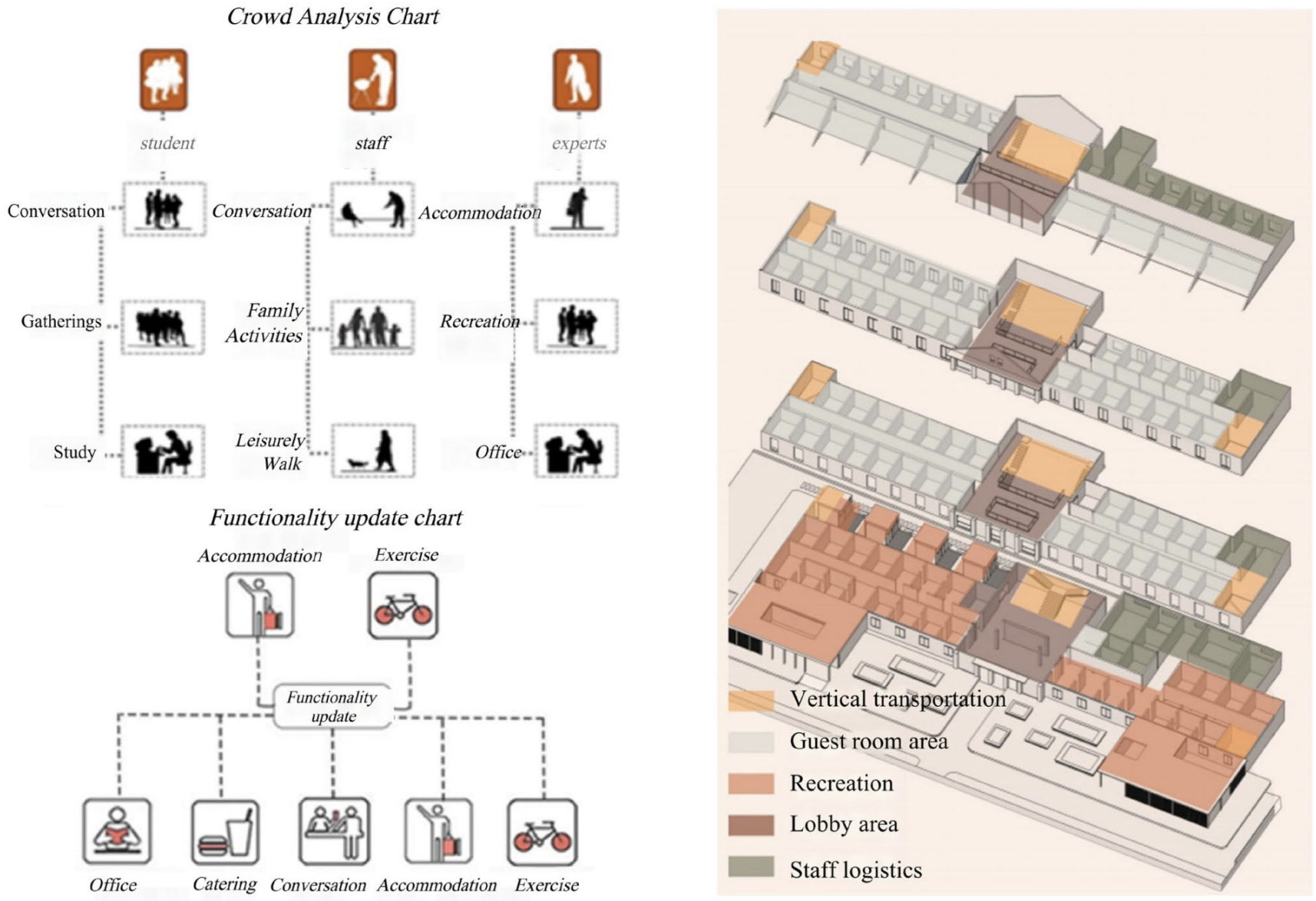
绿色改造方面,[Lin 等 2023][Green Renovation and Retrofitting of Old
Buildings: A Case Study of a Concrete Brick Apartment in Chengdu]
以成都一栋老式混合结构公寓为例,通过功能升级、结构加固与屋顶光伏系统组合改造,实现约
60% 的节能率,光伏发电覆盖 42–76% 的自用电量,静态回收期约 1.9
年,显示老旧建筑在节能与低碳方面具有可观的改造潜力。这类研究强调的是通过技术方案在既有结构内嵌入新的系统功能。
image-20251118184332770
图4 针对既有建筑的功能提升
老龄友好与健康方面,[Guo 等 2024][Enhancing Elderly Well-Being:
Exploring Interactions between Neighborhood-Built Environment and
Outdoor Activities in Old Urban Area]
强调老旧城区的道路、绿地和服务设施可达性对老年人的活动与健康至关重要;而从单体建筑和居住单元角度,越来越多的研究开始讨论室内环境对老年人安全和自理能力的影响,例如无障碍卫生间、扶手设置、减少高差与狭窄通道等。这与服务机器人在家中执行清扫、送物、巡检等任务所需要的连续、无障碍行走空间在物理条件上高度一致。
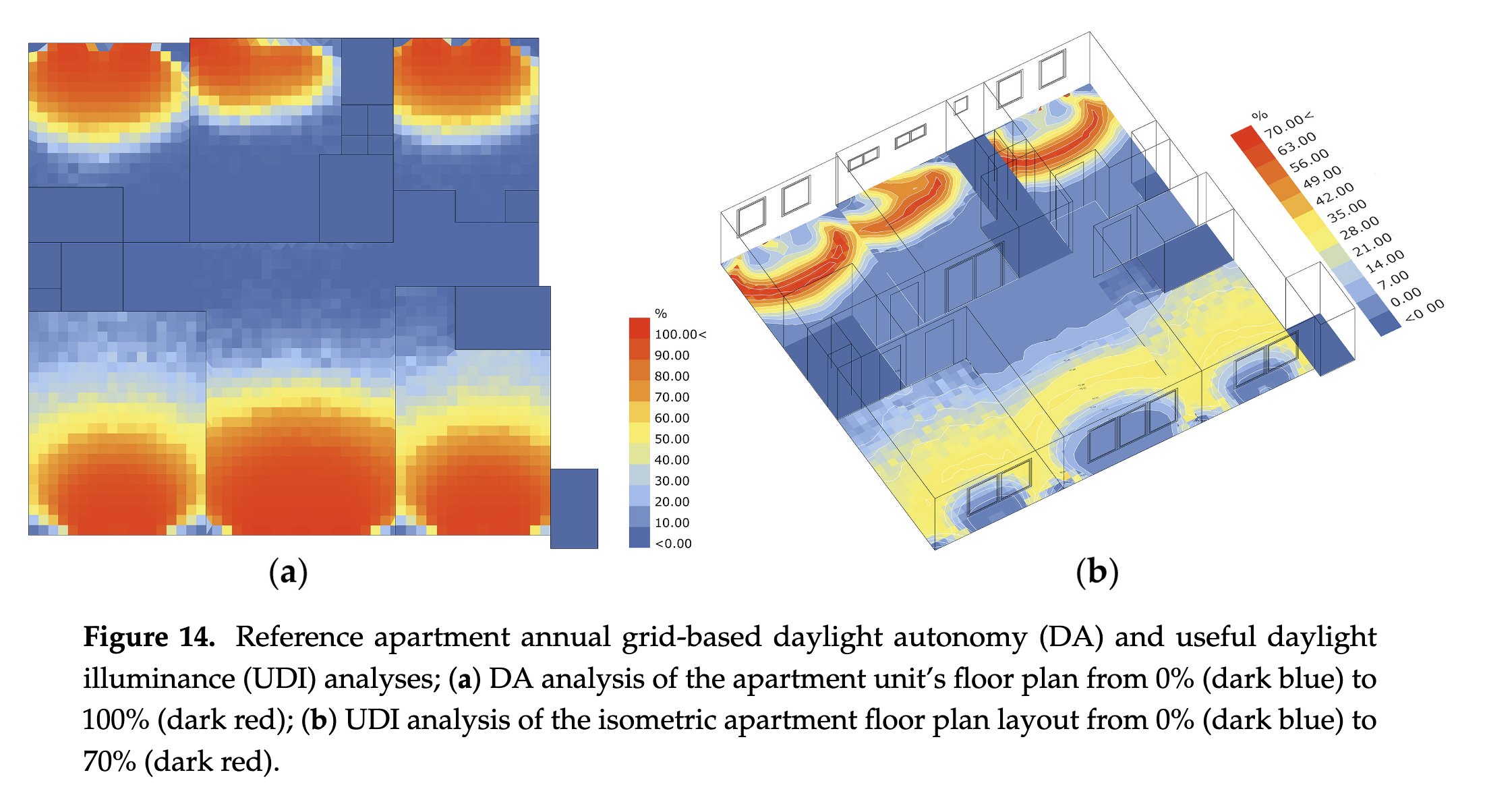
韩国旧公寓单元的改造研究中,[Amoruso 等 2019][Integrated
BIM-Parametric Workflow-Based Analysis of Daylight Improvement for
Sustainable Renovation of an Exemplary Apartment in Seoul, Korea]
建立了一个 BIM + 参数化环境模拟 工作流:先在 BIM
中重建既有公寓,再导入环境模拟软件做采光分析,通过调整外围护结构与户型布局,实现采光均匀度和日照自主性分别提升约
15% 和 30%。这说明“虚拟重建 +
参数化方案比选”可以为旧住宅改造提供定量决策支持。
image-20251118221543729
图5 数字孪生实际尝试
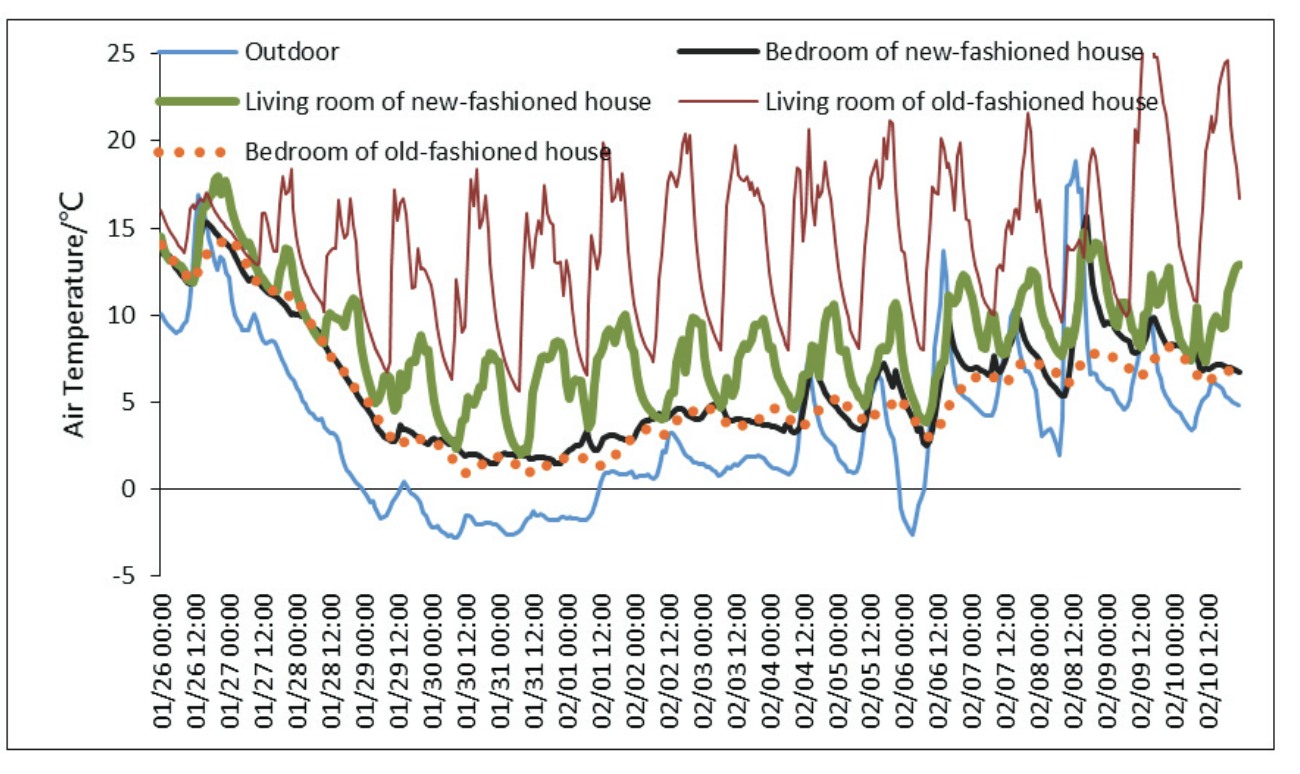
在传统吊脚楼的实测研究中,[Ma 等 2015][Physical Environment of
Stilted Buildings in Rural Area of Southwest China]
通过热环境、光环境、声环境与 CO₂
浓度测试,发现木结构围护保温与隔声性能差、自然采光严重不足,直接影响热舒适与健康,并提出需要通过布局调整与围护结构改造改善室内环境。
image-20251118222805496
图6
通过测试传统建筑不同房间的物理性能,进而得出需要通过布局调整与围护结构改造的方式改善室内环境
针对能耗低效建筑的外加模块改造,[Spegelj 等 2017][Development of the
timber-glass upgrade module for the purpose of its installation on
energy-inefficient buildings in the refurbishment process]
提出了可直接外挂在既有建筑上的木框—玻璃升级模块,通过对开窗比例与围护传热系数的大量参数化模拟,给出东西南三向不同最优窗墙比范围,以实现暖通能耗最小。该研究把“模块化附加体
+
参数化能耗优化”结合,为老旧建筑节能改造提供了可工业化推广的路径。
从城市和区域尺度,[Aldossary 等 2017][Establishing domestic low
energy consumption reference levels for Saudi Arabia and the Wider
Middle Eastern Region]
通过对三种典型住宅原型进行能耗模拟,建立了适应沙特及中东地区的住宅低能耗参考值,为推动大规模节能改造提供政策与技术基准。这提示我们,单套户型的改造方法若要具备推广性,最好能与某种“性能基准或门槛”衔接。
在通风与冷热舒适方面,[Spentzou 等 2022][Low-energy cooling and
ventilation refurbishments for buildings in a Mediterranean climate]
在地中海气候住宅中,对各种低能耗冷却与自然通风改造措施(如风帽、动态立面、蒸发冷却、内部布局调整)进行评估,发现通过布局调整开辟新的气流路径,可有效配合被动系统提升通风与安全性。
面向养老机构居住单元,[Liu 等 2024][Research on Optimization Design
Strategies for Natural Ventilation in Living Units of Institutional
Elderly Care Facilities Based on Computational Fluid Dynamics
Simulation] 通过实测 +
CFD,比较不同平面深度、开窗位置与开口面积比例对自然通风效果的影响,提出了如:南向房间进深控制在
8.4 m、开窗集中布置、通风开口面积与房间面积比大于 1/12
等可直接指导设计/改造的布局策略。
image-20251119112356669
图7
对实际案例进行实测,来确认不同空间的物理性能,并在此基础上得出一些优劣的差距
[Shamaileh 等 2023][Optimizing Air Movement for Thermal Comfort:
Spatial Adaptations and Occupant Satisfaction in Residential Activity
Spaces]
关注吊扇风速分布对卧室、客厅、厨房热舒适及住户满意度的影响,结合实测与数值模拟指出,家具布置和开窗状态等物理环境因素显著影响居室内空气流动和布局选择,为“在改造中如何兼顾布局与通风舒适”提供了参考。
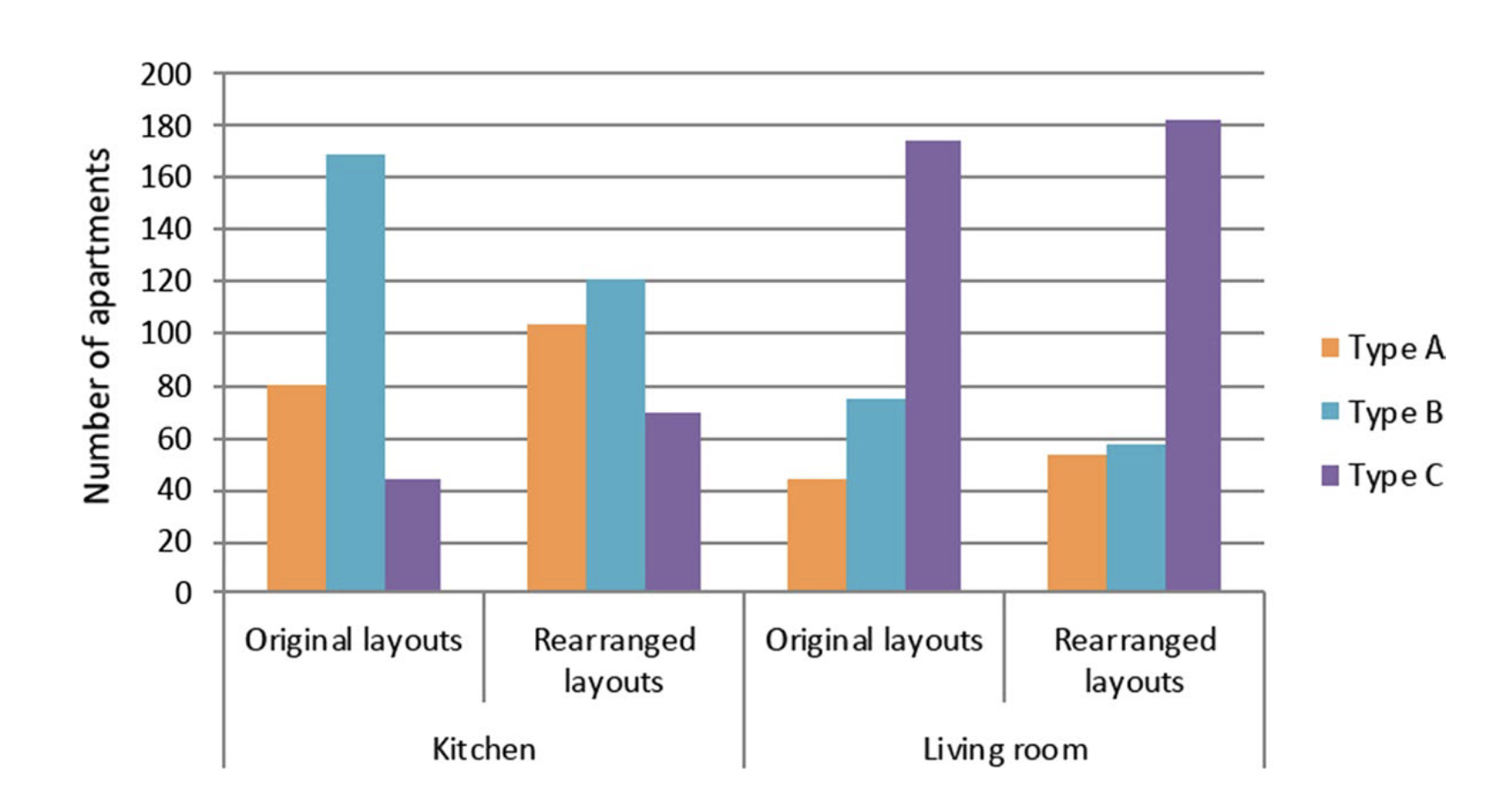
[Femenias 等 2020][Adaptable housing? A quantitative study of
contemporary apartment layouts that have been rearranged by end-users]
基于 313
套已被业主自行改造的公寓平面,用空间句法定量分析发现:起居空间的面积、初始平面的“碎片化”程度,与后期被改造的可能性高度相关。研究强调当代公寓普遍缺乏“通用性/多用性”,导致大量资源被消耗在后期改造上,呼吁市场在设计阶段就考虑后期可重构性。
image-20251119113611952
图8
通过调查不同户型的用户改造意愿,提出建筑在设计阶段就应该考虑后期的可重构性
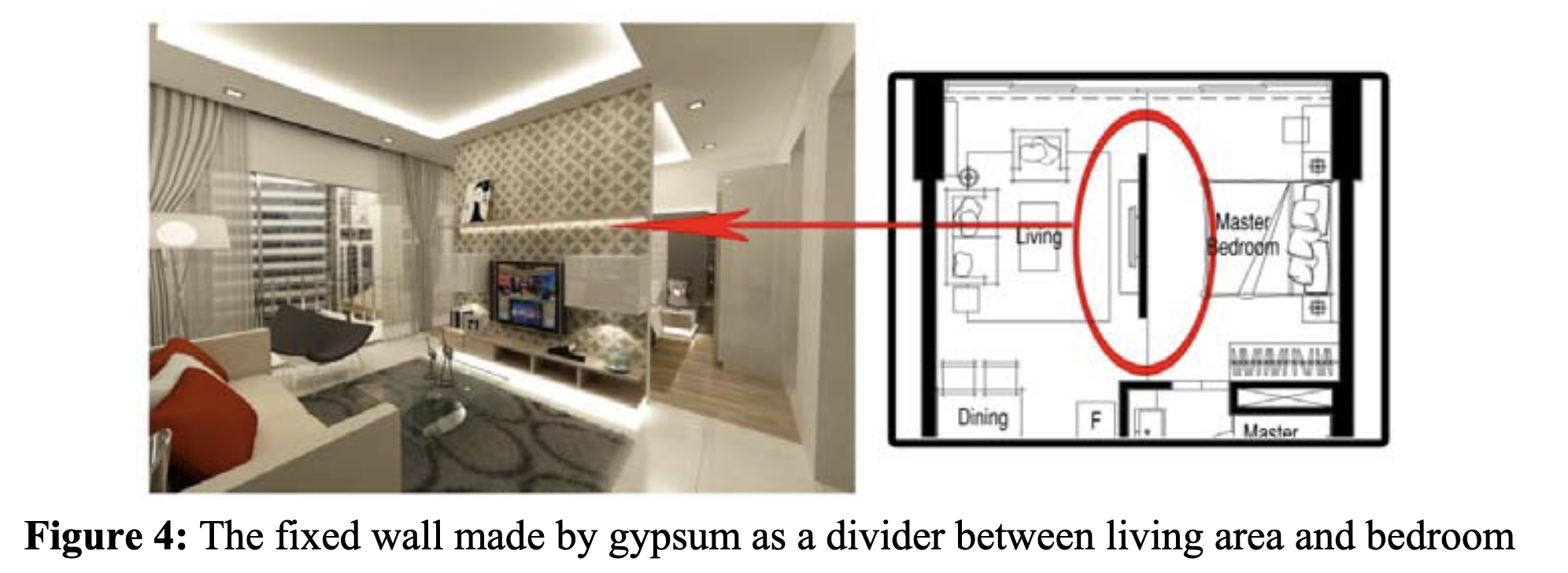
[Tawil 等 2014][Evolution Sustainable Green Inner-wall with Flexible
Floor Plan] 提出采用可持续内墙系统 +
灵活平面的理念:通过减少湿作业内隔墙、使用可拆卸的内墙模块,业主可以在不破坏结构的前提下按需增减房间。研究的现实背景是马来西亚普遍存在不合规范且有安全隐患的民间改造,这种“可变内墙”被视为降低不规范改造风险、控制成本的一种途径。
image-20251119123812083
图9 实际的改造策略
在更“智能”的方向上,[Dongre 等 2021][Re-imagining Indoor Space
Utilization in the COVID-19 Pandemic with Smart Re-configurable Spaces
(SReS)]
面向疫情期间公共空间的安全利用,提出“智能可重构空间(SReS)”概念,利用
Revit
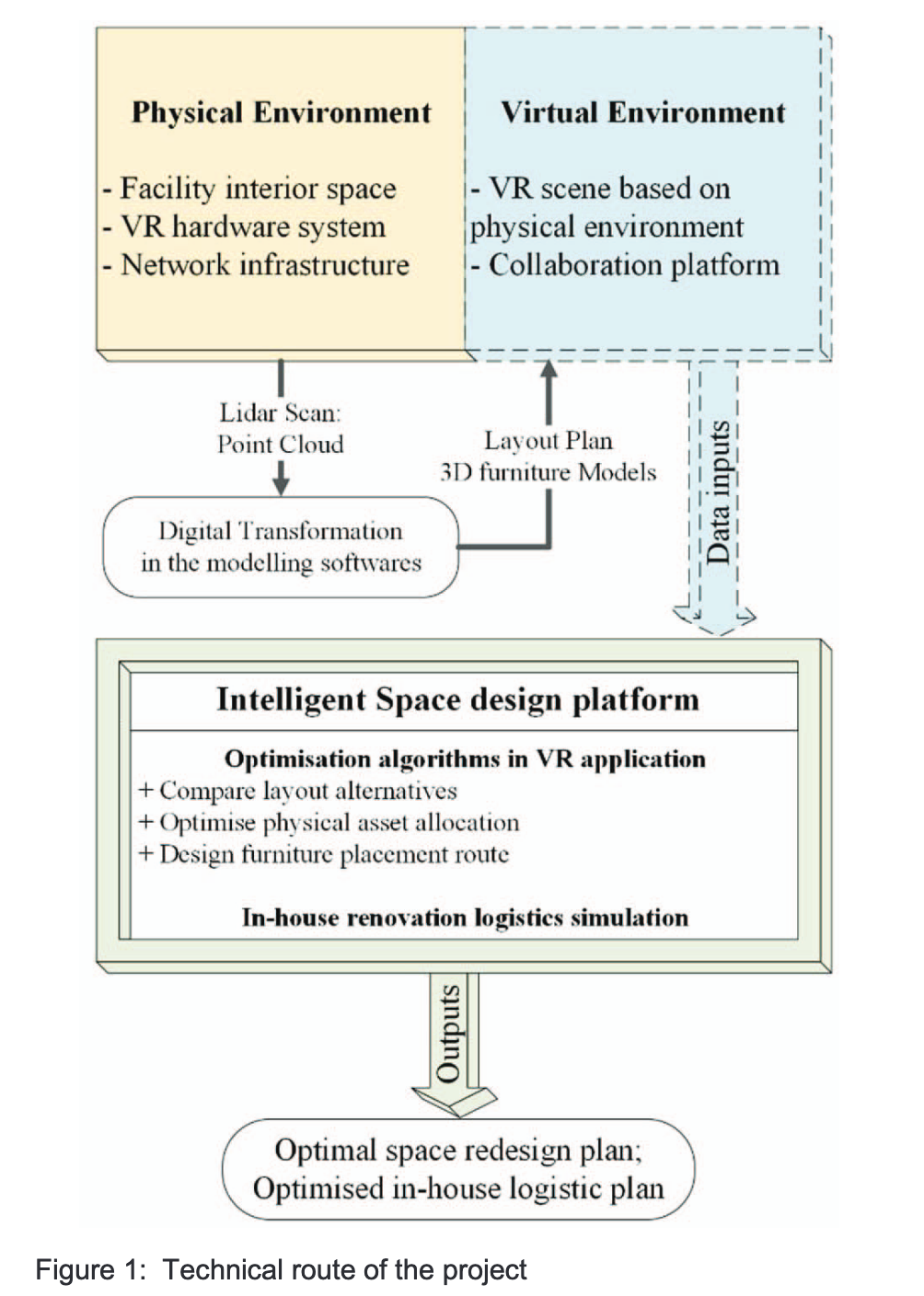
的生成式设计工具生成多套布局方案,并基于使用者访谈与需求分析优化,探索随疫情防控要求和使用人数动态调整布局的可能性。虽然对象是设施空间而非住宅,[Liang
等 2024][VR-enabled intelligent space planning platform for facility
layout redesign] 结合 VR
与优化算法,开发了一个用于设施空间改造的智能空间规划平台,让用户在虚拟环境中比较不同布局方案、优化设备布置和物流动线。其思路——“人在
VR 中体验 +
算法在后台优化”——同样可迁移到居住空间的改造设计与评估中。
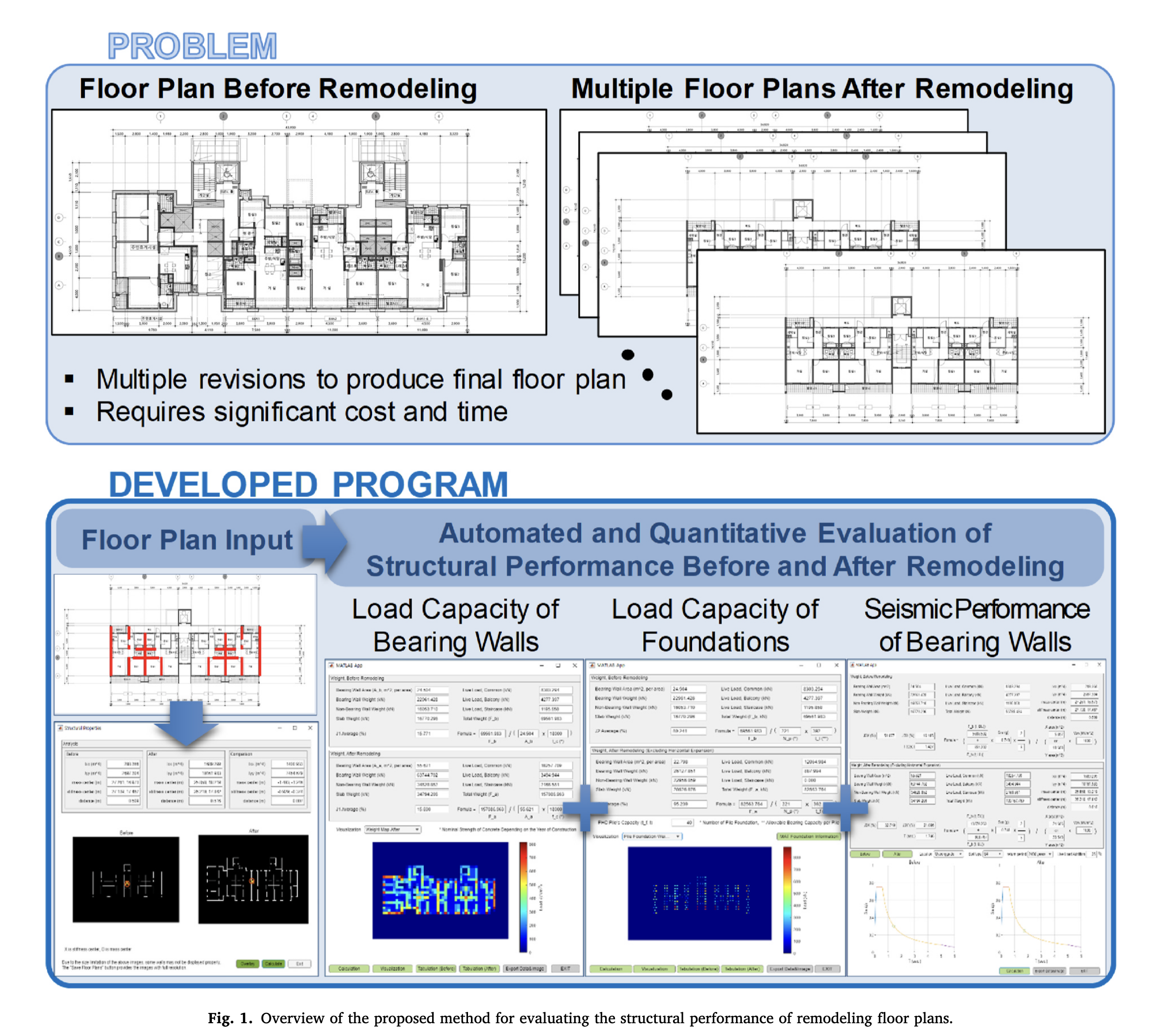
[Moon 等 2024][Enhanced method for evaluating remodeling floor plans
for apartment complexes with an emphasis on efficiency and accuracy]
面向韩国老旧公寓综合体改造,提出了一个用于初步方案阶段的结构评价程序,可在数十分钟内完成单栋的结构指标计算,与商业有限元软件结果差异在
5% 以内,但耗时从 8–16 h 降到 35 min,大幅提高多方案比选阶段的效率。
image-20251119234238534
图11
本文的主要重点在于对平面图的分析(将CAD转化为图像),然后分析承重墙以及其他的结构信息
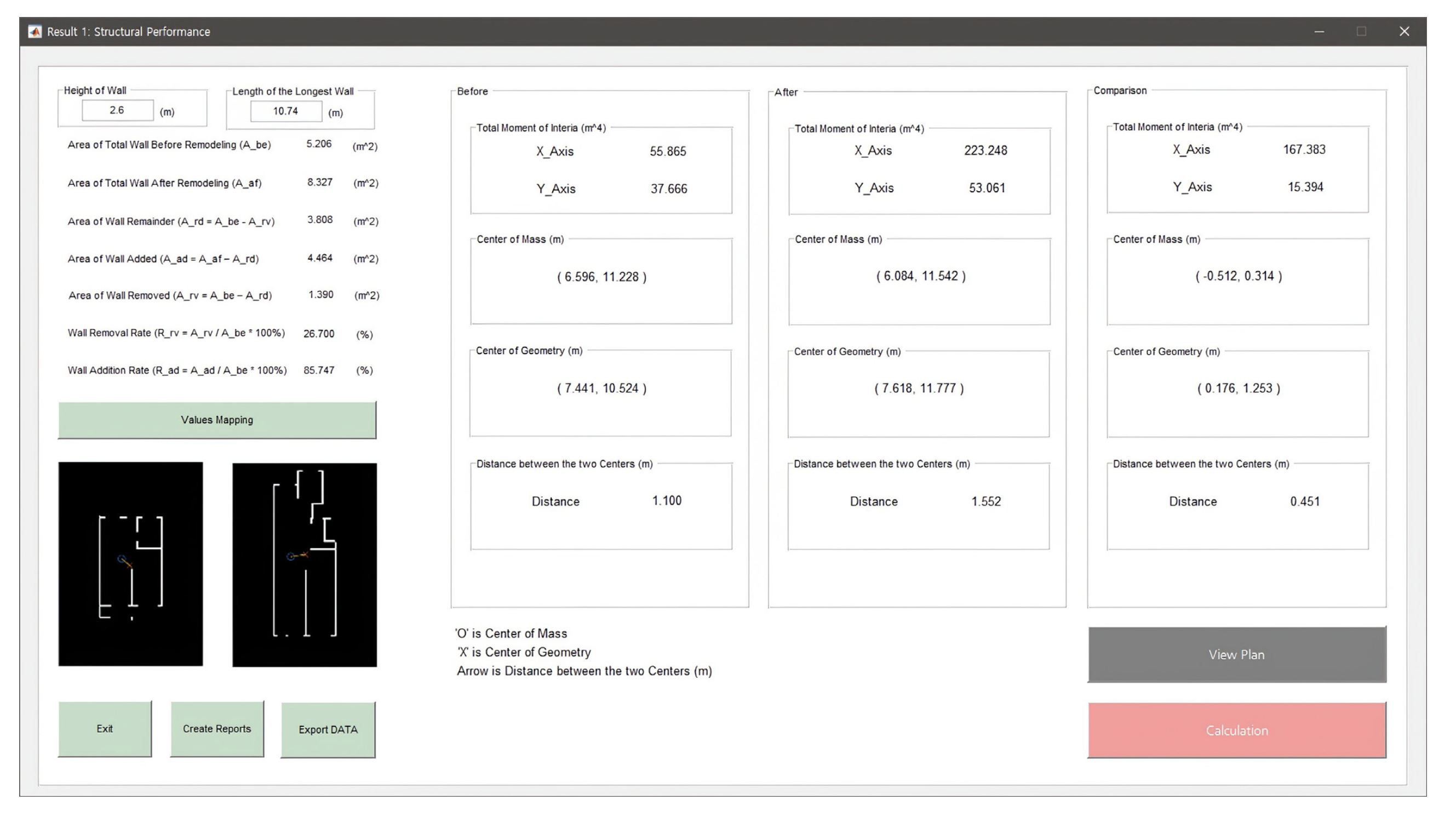
[Kim 等 2021][Automated and qualitative structural evaluation of
floor plans for remodeling apartment housing]
则开发了一套自动结构评价应用:读取概念平面图后,计算承重墙的拆除/保留/新增量、各墙体的三维视图、截面惯性矩、楼板扭转刚度,并提出综合的结构指数(SI)用于直观比较不同方案。案例表明该工具误差在
1.3% 内,但计算速度提升近 7
倍,使“边画方案、边看结构安全指标”成为可能。
在平面解析层,[Yang 等 2022][Automated Semantics and Topology
Representation of Residential-Building Space Using Floor-Plan Raster
Maps]
提出从栅格平面图自动提取室内语义与拓扑的方法:通过学习型分割识别几何基元,再用混合整数规划和拓扑优化构建房间—门—走廊的图结构。成果可直接用于三维模型弹出和布局计算,为“从平面图自动生成可计算室内模型”提供了技术路线。
image-20251119235805203
图13
武汉大学在2022年提出的直接识别平面图以生成具有语义与拓扑关系的模型输出
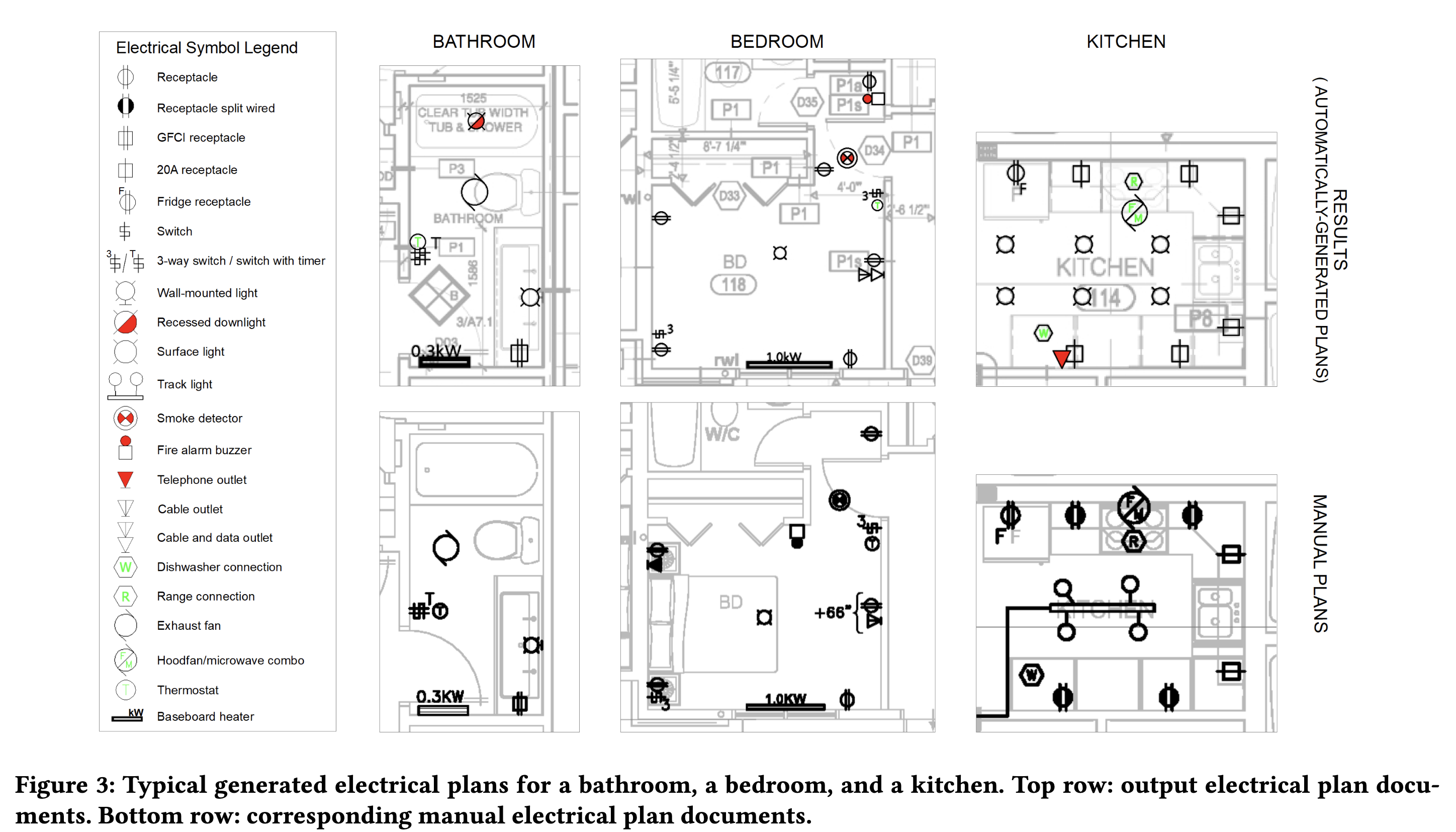
在工程专业图生成方面,[Cote 等 2020][Automatic Generation of
Electrical Plan Documents from Architectural Data]
将建筑平面作为输入,通过栈式有限状态机模型自动生成住宅电气平面图(插座、开关等布置),模拟电气设计师的决策过程。该研究强调了从建筑几何数据自动生成细部专业图的可行性和时间节省效益。
image-20251120000424615
图14 加拿大团队在2020年提出的在平面图基础上直接生成设备图纸
[Boudreaux 等 2012][Occupancy Simulation in Three Residential
Research Houses]
虽主要聚焦能耗研究,但其在三种不同性能住宅中构建统一的“自动居住行为仿真系统”,以规避真实住户行为的随机性,为“在虚拟环境中进行稳定可重复的性能比较”提供了方法范式,这一理念对你后续做机器人仿真评估也有借鉴意义。
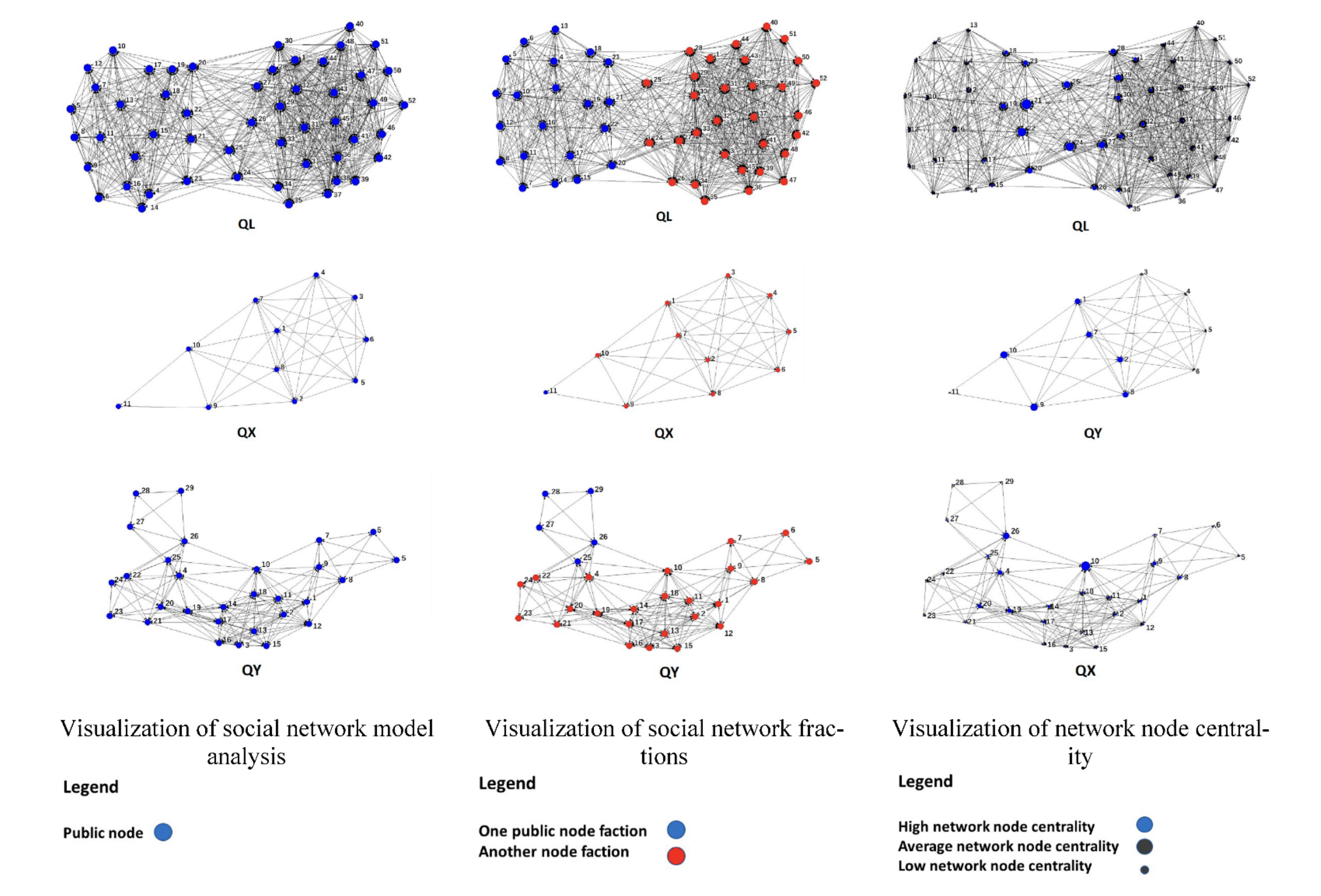
[Zhao 等 2021][Public Space Layout Optimization in Affordable
Housing Based on Social Network Analysis]
将经济适用房小区公共空间视作物理网络,用社会网络分析评估节点度、聚类系数和“小世界”特征,分析空间结构如何影响居民的使用频率与行为模式,从而提出“补节点、强联系”的公共空间改造建议。它展示了一种从行为网络角度优化空间布局的方法。
image-20251120000854701
图15 以一栋居民楼为基本节点出发研究一个社区的社会关系
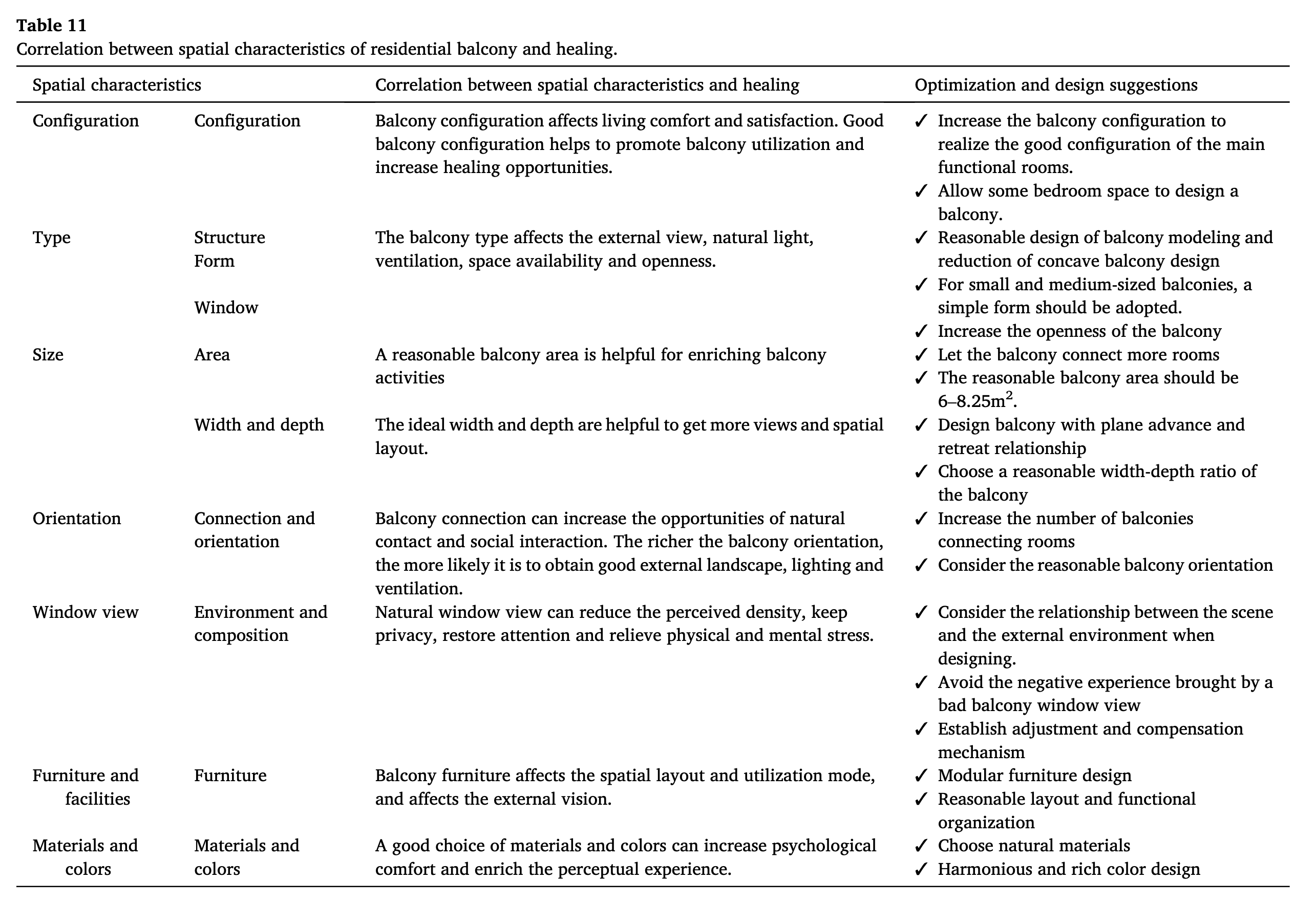
聚焦阳台这一“半室内—半室外”的空间,[Song 等 2024][Healing properties
of residential balcony: Assessment of the characteristics of balcony
space in Shanghai’s ’ s collective housing] 基于 1641
种上海集体住宅户型,构建阳台疗愈特性评价框架,发现当前阳台的疗愈水平普遍偏低,而结构类型、连接方式、面积、视野与家具等空间特征之间存在复杂交互,对疗愈表现有直接或间接影响。该研究提出针对性的阳台设计与改造建议,将阳台明确视为“家庭中的疗愈空间”。
[Shamaileh 等 2023][Optimizing Air Movement for Thermal Comfort:
Spatial Adaptations and Occupant Satisfaction in Residential Activity
Spaces]
则用实验与模拟研究了不同活动空间(卧室、客厅、厨房)中风速分布、热感受与满意度之间的关系,并指出物理环境因素(布局、开窗、风扇位置与工况)是决定性变量,为室内布局与设备布置的舒适性评价提供了视角。
[Dongre 等 2021][Re-imagining Indoor Space Utilization in the
COVID-19 Pandemic with Smart Re-configurable Spaces (SReS)] 和 [Liang 等
2024][VR-enabled intelligent space planning platform for facility layout
redesign] 则共同把空间改造与疫情防控、安全距离、VR
体验和生成式设计结合,体现了“在虚拟环境中先试用、再定方案”的设计模式。
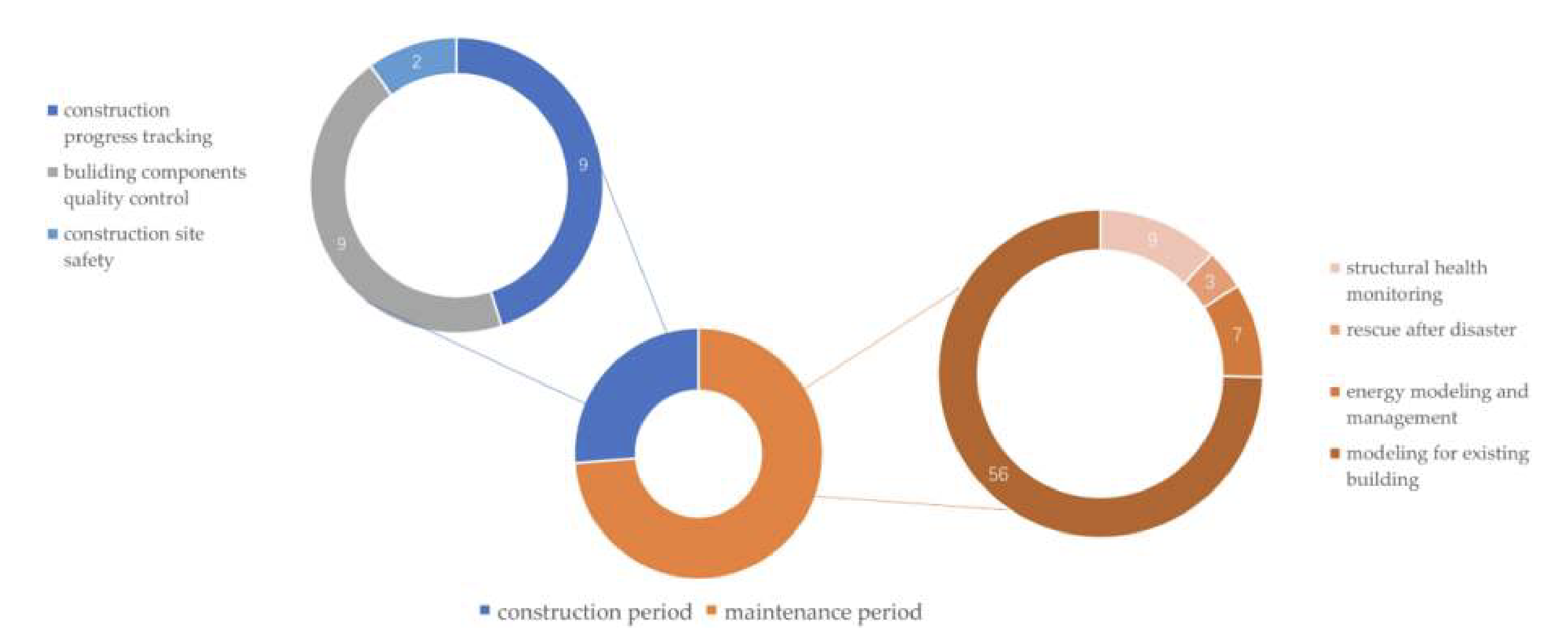
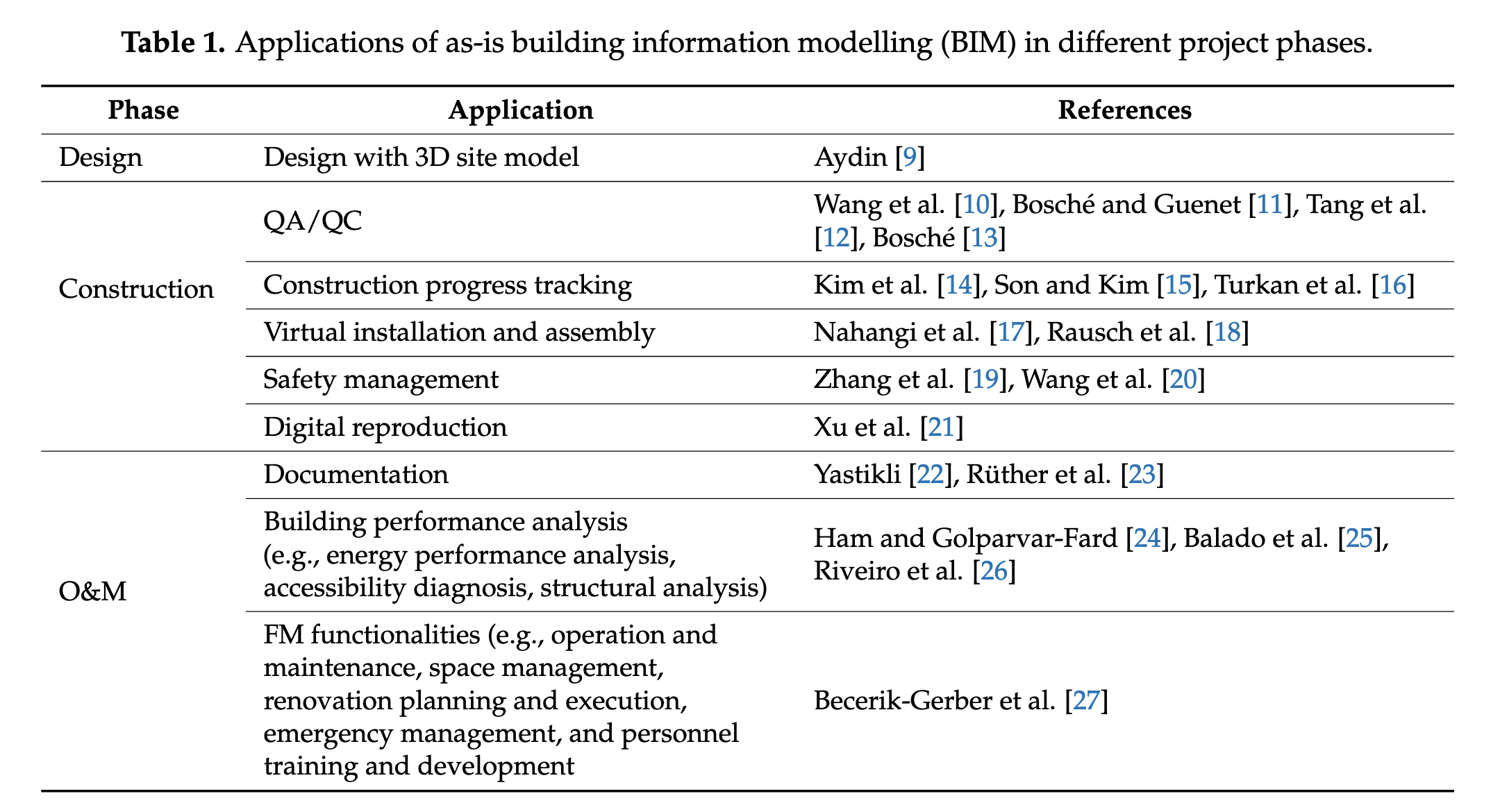
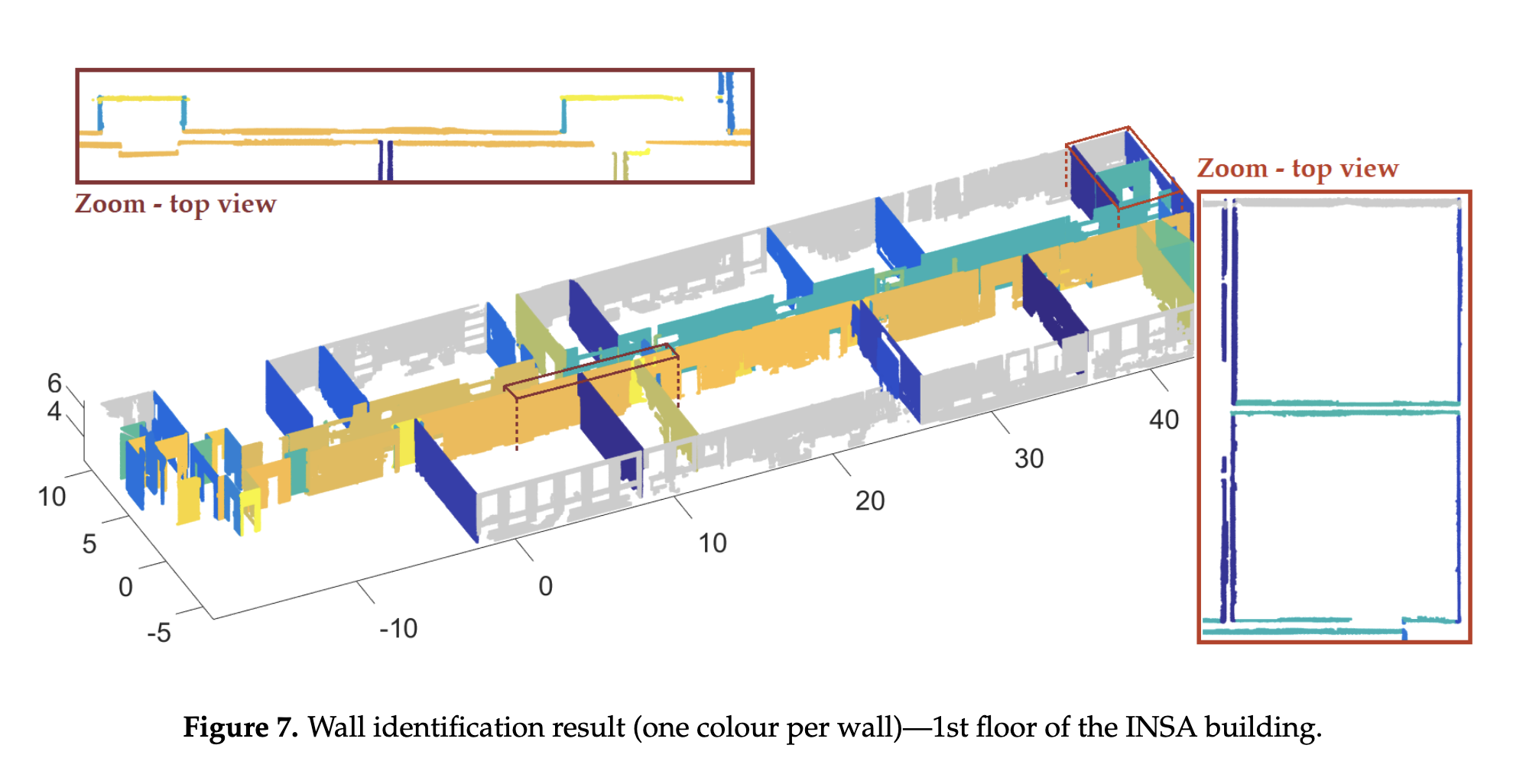
随着 3D 激光扫描设备与 BIM 技术的成熟,“Scan-to-BIM”
已成为获取既有建筑几何与语义信息的主流路径。[Liu 等 2021][A Survey of
Applications With Combined BIM and 3D Laser Scanning in the Life Cycle
of Buildings] 系统梳理了 BIM
与三维激光扫描在建筑全寿命期的结合应用,将其划分为施工期与运维期两个阶段,并指出通过点云构建
as-built / as-is
模型,可支撑施工进度跟踪、质量控制、能耗分析以及既有建筑建模等多种任务。
在室内空间层级,[Macher 等 2017][From Point Clouds to Building
Information Models: 3D Semi-Automatic Reconstruction of Indoors of
Existing Buildings]
通过分割地面、顶棚与墙体点云,半自动重建室内墙体与楼板,并输出 IFC
模型,强调了 Scan-to-BIM
在室内环境中仍大量依赖人工操作、易出错且耗时。这类研究表明:在既有建筑室内,如何在保证精度的前提下降低人工建模成本,是
Scan-to-BIM 发展的关键瓶颈之一。
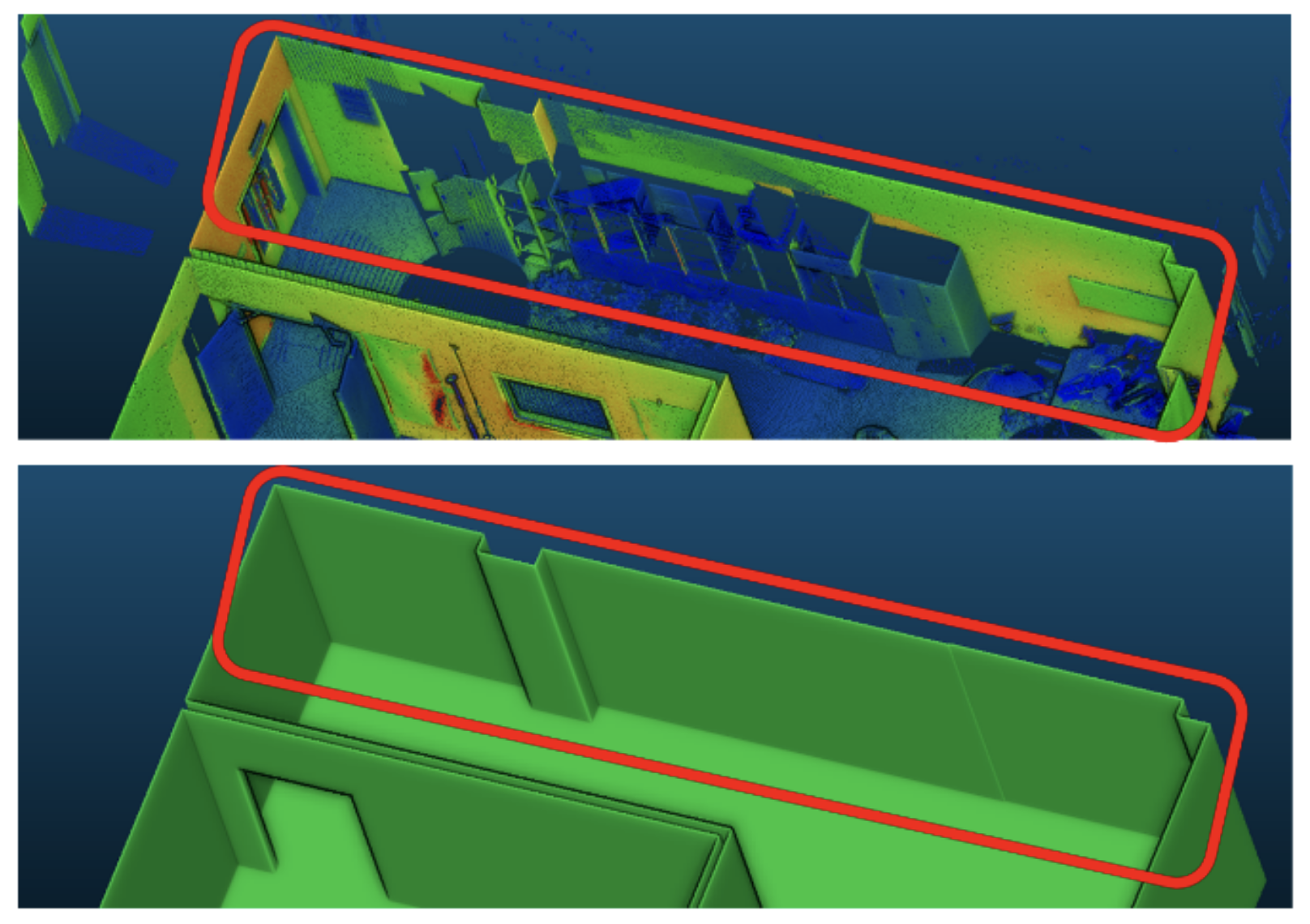
[Skrzypczak 等 2022][Scan-to-BIM method in construction: assessment
of the 3D buildings model accuracy in terms inventory measurements]
则从精度控制角度,对三栋建筑的 TLS 点云及其 3D
模型进行对比,发现合理布站与建模流程下,空间尺寸误差可控制在 ±1 cm
范围内,足以支撑既有建筑测绘与 BIM
建模。这为本文在老旧住宅中采用厘米级精度的点云建模,提供了可行性依据。
image-20251120010217679
图20
2022年,有团队再次验证了三维重建与revit模型之间的精度,认为其已经足够可信
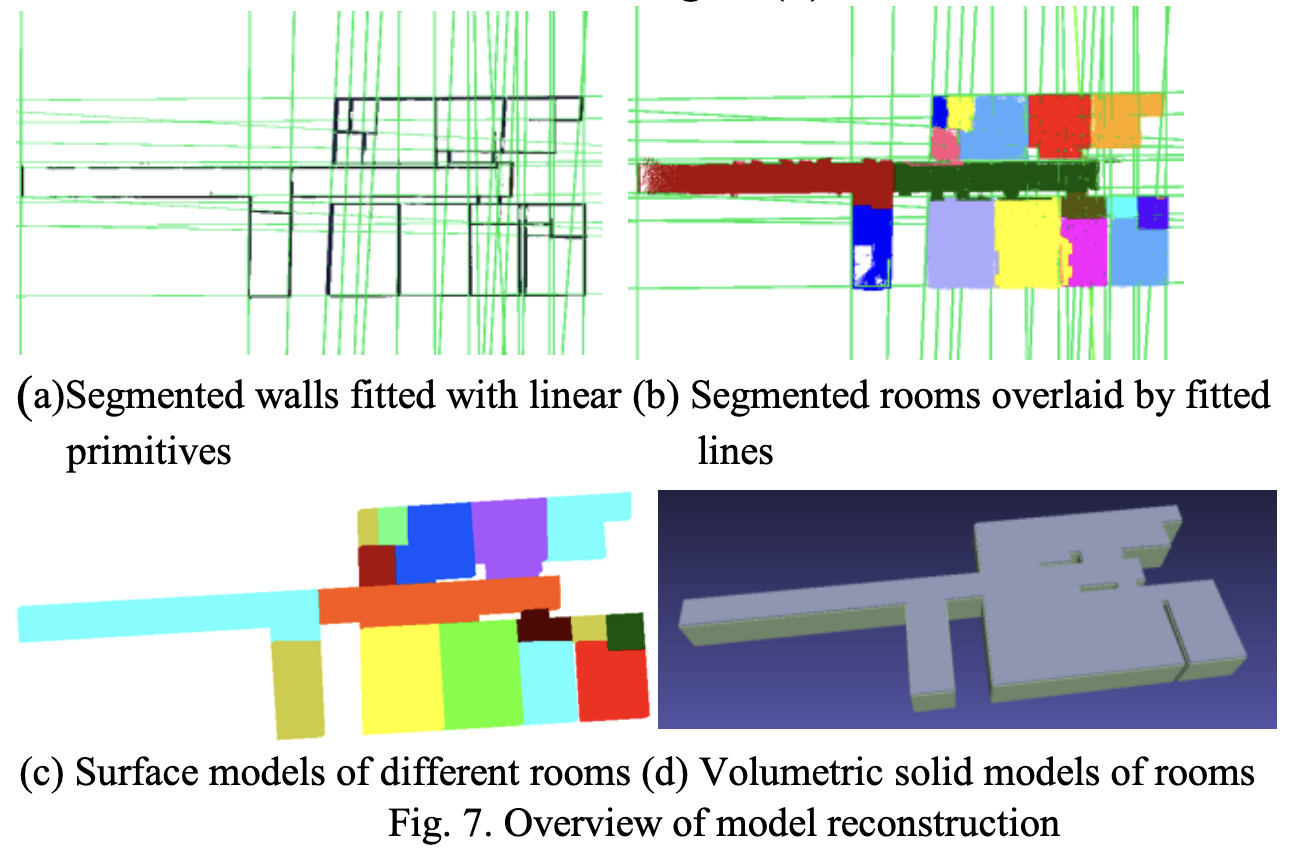
点云驱动的室内空间结构重建与房间拓扑提取
围绕“从点云到房间—走廊—门洞拓扑”的自动化重建,是将室内扫描结果转化为可计算空间模型的核心。
[Cai 和 Fan 2021][An Efficient Approach to Automatic Construction of
3D Watertight Geometry of Buildings Using Point Clouds]
提出一种高效的“体素—投影—房间分割—挤出”流程:先将点云体素化并进行射线分析得到室内空腔体,再在水平投影上分割房间,利用“语法规则”提取
2D 房间边界并按房间高度挤出 3D
室内模型,最后通过房间连通性分析确定门洞位置与房间拓扑关系。该方法在六个包含房间、走廊与开口的建筑数据集上平均几何误差仅
12–21 mm,469M 点云的最大建模时间少于 5
min,展示了在大规模点云上快速生成“水密”室内几何模型的能力。
image-20251120010709203
图21 基于点云生成可以被用于计算的空间模型
[Cui 等 2019][Automatic 3-D Reconstruction of Indoor Environment
With Mobile Laser Scanning Point Clouds]
基于移动激光扫描(MLS)数据,提出自动室内结构重建方法:利用几何与语义特征提取门窗、墙、地、顶等构件;结合可见性分析与构件物理约束进行房间自动分割;再通过多标签图割构建多房间三维结构模型。该方法在多层、多房间复杂室内环境中验证了其对
MLS 数据的适应性。
image-20251120111313620
图22 通过语义分析的方式
面向 5G 信号模拟,[Cui 等 2019][Structural 3D Reconstruction of
Indoor Space for 5G Signal Simulation with Mobile Laser Scanning Point
Clouds] 在上述框架基础上,实现了面向室内大尺度 5G
小基站布设的结构化三维模型自动构建。这一工作表明:通过点云重建的室内结构模型,可以与特定性能仿真(如通信覆盖)相耦合,形成“重建—仿真—优化”的完整链条,与本文拟构建的“重建—机器人仿真—布局优化”在方法逻辑上高度一致。
在空间分割与开口检测方面,[Zheng 等 2018][Space Subdivision in
Indoor Mobile Laser Scanning Point Clouds Based on Scanline Analysis]
提出基于扫描线的室内空间细分方法,通过分析扫描线局部几何规则性来识别墙体上的开口位置(门、窗等),再结合传感器轨迹完成室内空间子区域划分,并将结果以标签形式写回点云,用于后续导航与疏散路径规划。这一“基于开口位置和轨迹的空间划分”思想,与居家服务机器人在室内进行房间级路径规划的需求高度契合。
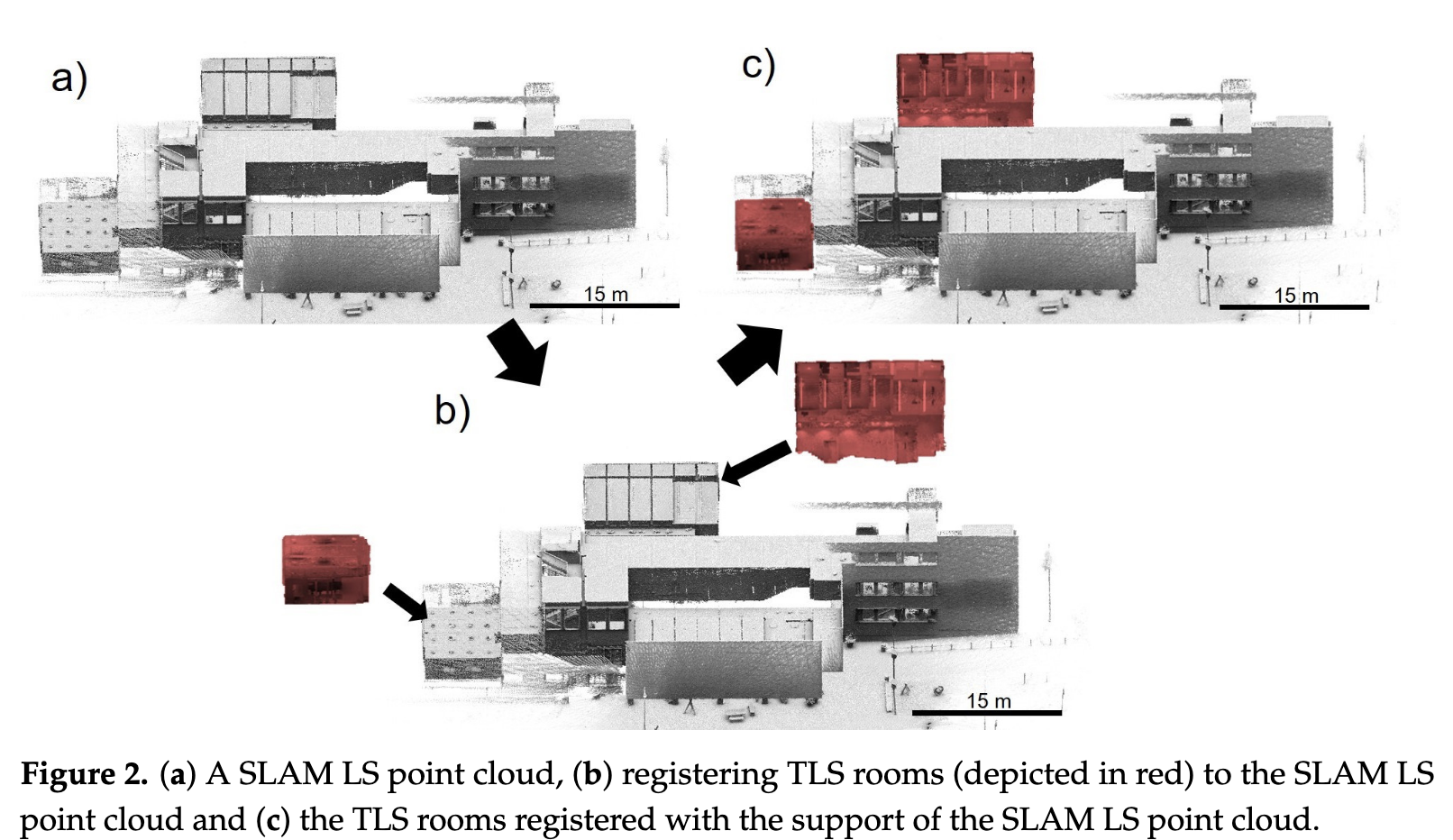
[Keitaanniemi 等 2021][The Combined Use of SLAM Laser Scanning and
TLS for the 3D Indoor Mapping] 提出利用 SLAM 激光扫描器辅助多站 TLS
配准的策略:仅在对精度要求较高的区域布设 TLS,其余区域由 SLAM
扫描补足。案例表明,利用 SLAM 结果辅助 TLS 站点配准,可将非重叠 TLS
点云定位误差控制在 18–51 mm
范围内。此思路为在整体住宅中局部“精扫”、整体“快扫”的混合策略提供了参考。
image-20251120124639098
图23 阿尔托大学在2021年的一个建筑信息提取中使用的TLS与SLAM相结合的方法
[Yigit 等 2024][Comparative analysis of mobile laser scanning and
terrestrial laser scanning for the indoor mapping]
在四类不同几何特征的室内空间中,对比了 TLS 与可穿戴
MLS(WMLS)的精度与效率。实验结果表明,在参考高精度测量设备的对比下,WMLS
在空间与长度精度上可替代
TLS,同时在时间成本上具有显著优势。该结论意味着:在广州老旧住宅这类空间局促、站位受限的场景中,可穿戴
MLS 或 SLAM 系统是获取整户点云的现实选择。
围绕低成本与室内适应性,[Chen 等 2019][Development of low-cost
mobile laser scanning for 3D construction indoor mapping by using
inertial measurement unit, ultra-wide band and 2D laser scanner] 将 2D
激光扫描仪与 UWB、IMU 组合,构建低成本室内 MLS 系统,实现 3D
点云重建,并与 TLS
结果对比验证其可用精度。作者指出,该方案在硬件成本和作业灵活性上具有潜在优势,适合室内复杂环境的快速测绘。
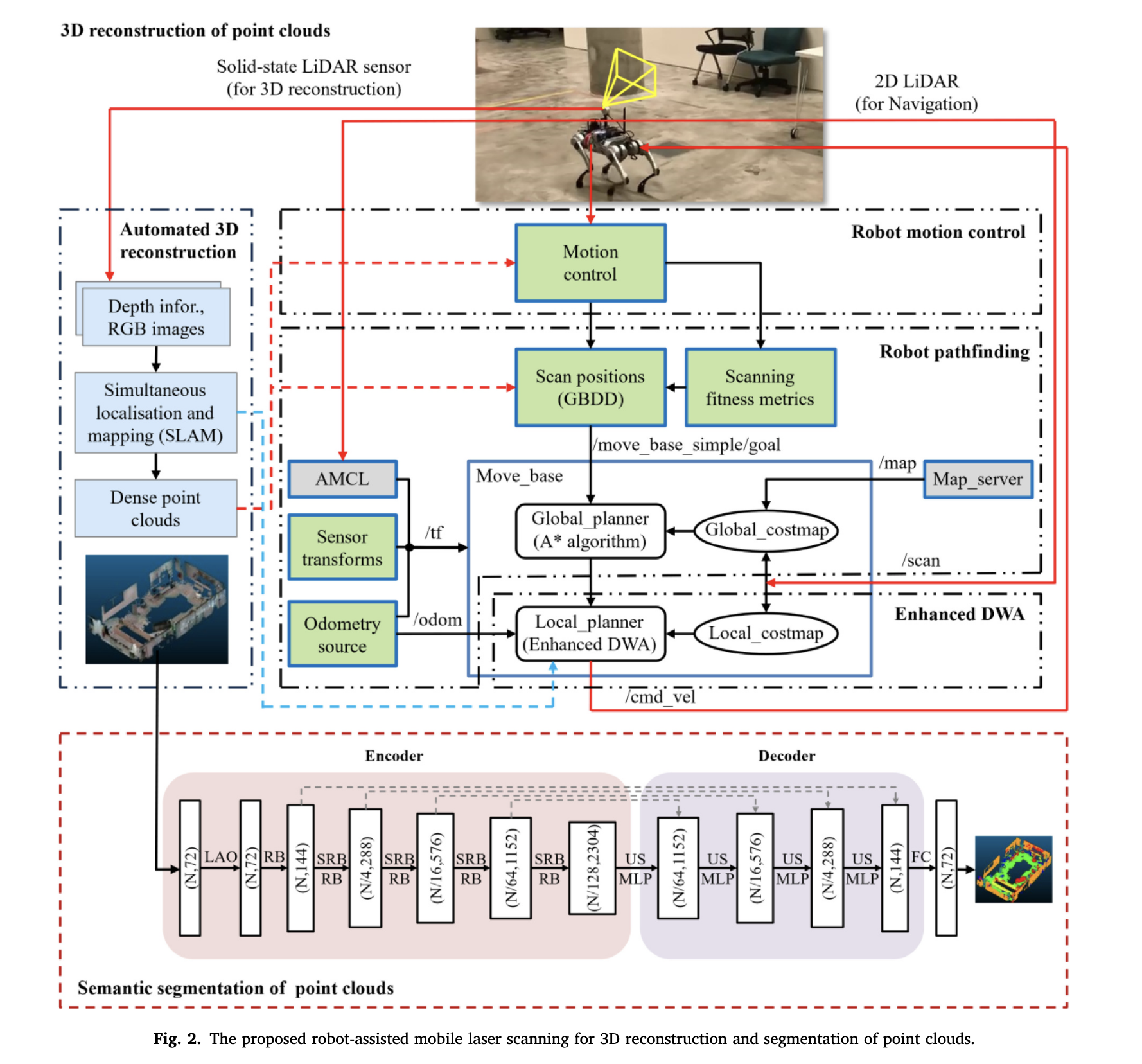
更接近本文“具身代理”视角的是,[Hu 等 2023][Robot-assisted mobile
scanning for automated 3D reconstruction and point cloud semantic
segmentation of building interiors] 基于多足机器人与固态
LiDAR,提出机器人辅助移动扫描方法,将 SLAM
与机器人运动控制和路径规划深度耦合,通过自定义“扫描适宜度”指标与栅格化寻路算法,生成覆盖率与点密度较高的室内点云,并利用
ResPointNet++ 实现语义分割,mIoU 达
81.75%。该研究表明:当扫描载体本身就是机器人时,可以通过规划其行走路径显著提升点云质量与完备度,这一思路可与本文后续的服务机器人仿真平台形成方法上的统一。
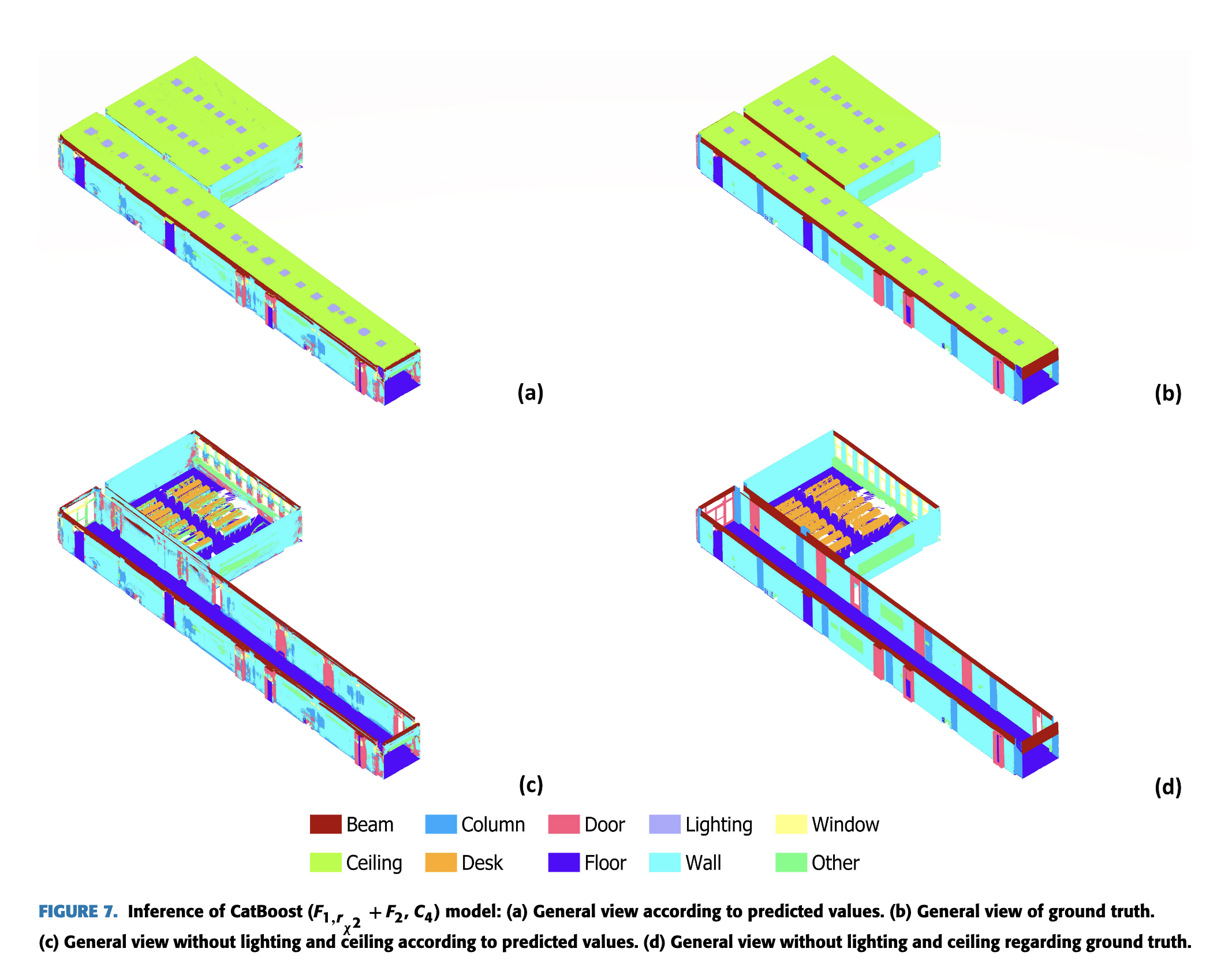
[Aksu 和 Demirel 2024][Extracting Structural Elements From 3D Point
Clouds in Indoor Environments via Machine Learning Techniques]
提出利用机器学习对室内点云进行结构构件分类的框架,通过特征提取与特征选择,分别采用
CatBoost 与随机森林实现对墙体、梁柱等构件的分类,精度约 83%,并利用 SHAP
分析发现 Z
坐标与“竖直度”对识别贡献最高。该工作为自动区分可改动/不可改动构件、构建结构约束空间提供了可行路径。
image-20251120125748460
图25 通过机器学习的方式来识别点云中建筑空间的结构信息
[Habib 和 Lin 2016][Multi-Class Simultaneous Adaptive Segmentation
and Quality Control of Point Cloud Data]
则提出多类别自适应区域生长分割方法,同时识别平面、柱状和粗糙区域,并嵌入质量控制过程以纠正误分割区域;这对于保证室内墙面、柱体等关键几何的可靠性,具有重要意义。
image-20251120130036926
图26 2016年的研究主要通过几何的推理的方式来进行分割
针对室内/建筑出入口无障碍问题,[Balado 等 2017][Automatic building
accessibility diagnosis from point clouds] 基于 MLS
点云自动检测城市建筑入口台阶的高度、宽度与相对地面的关系,并按照规范判断其可达性,F1
值约 93%。随后,[Balado 等 2018][Automatic classification of urban
ground elements from mobile laser scanning data]
将地面点云划分为道路、人行道、踏步、踢面和路缘等类别,分类精度约
97%。这两项工作展示了如何从点云自动提取与人行可达性密切相关的几何指标,并与规范参数进行比对。
image-20251120131032252
图27 通过判断扫描点云中台阶的高度来判断可达性
image-20251120131318972image-20251120131611891
图28 通过点云语义分割的方式来获取场景中的基础语义信息
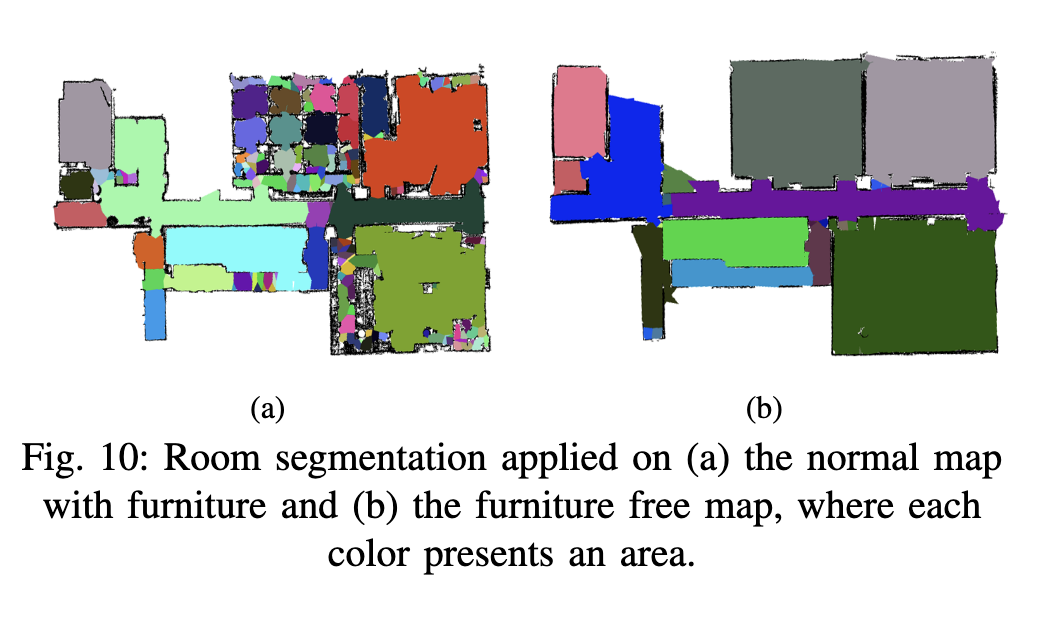
与机器人运行场景更直接相关的是 [He 等 2019][Furniture Free Mapping
using 3D
Lidars],该研究使用一对正交激光雷达(水平用于定位,垂直用于墙面检测和语义标注),通过点云重排、墙面平面检测和语义标注,剔除室内家具等可移动物体,仅保留墙体结构,生成“无家具地图(furniture-free
map)”,在典型室内环境中对墙面的保留精度达
99.6%。该研究表明:
同时,诸如[Cao 等 2022][Towards automatic flatness quality
assessment for building indoor acceptance via terrestrial laser
scanning] 利用 TLS
点云进行室内地面平整度自动验收,说明点云也可以直接服务于室内品质与验收指标的计算。这类基于点云的几何量化方法,为本文后续利用点云模型间接推导“机器人可达面积比例、转弯空间、碰撞风险”等指标提供了可借鉴的技术基础。
image-20251120131957309
图30 自动验收
小结:面向机器人友好型室内改造的建模基础与研究空白
综上,现有“室内激光扫描与既有建筑建模”研究已在以下方面取得较为成熟的成果:
在总体框架上,形成了以 3D 激光扫描为核心的 Scan-to-BIM /
Scan-to-Model
工作流,并强调“面向应用的信息需求与精度需求反推”的原则 [Liu 等 2021][A
Survey of Applications With Combined BIM and 3D Laser Scanning in the
Life Cycle of Buildings];[Wang 等 2019][An Application Oriented
Scan-to-BIM Framework];
在室内结构重建上,能够从 TLS/MLS
点云中自动提取房间、走廊、门洞等空间单元,并构建带拓扑关系的结构化三维模型
[Cai 和 Fan 2021][An Efficient Approach to Automatic Construction of 3D
Watertight Geometry of Buildings Using Point Clouds];[Cui 等
2019][Automatic 3-D Reconstruction of Indoor Environment With Mobile
Laser Scanning Point Clouds];
在扫描技术路线上,形成了 TLS、可穿戴
MLS、低成本移动扫描与机器人辅助扫描等多种组合方案,为在复杂室内环境下平衡测量精度与效率提供了实践依据
[Keitaanniemi 等 2021][The Combined Use of SLAM Laser Scanning and TLS
for the 3D Indoor Mapping];[Yigit 等 2024][Comparative analysis of
mobile laser scanning and terrestrial laser scanning for the indoor
mapping];[Chen 等 2019][Development of low-cost mobile laser scanning
for 3D construction indoor mapping by using inertial measurement unit,
ultra-wide band and 2D laser scanner];[Hu 等 2023][Robot-assisted
mobile scanning for automated 3D reconstruction and point cloud semantic
segmentation of building interiors];
在点云语义化与几何指标提取方面,已有面向结构构件识别、无障碍诊断与“无家具地图”等方法,可以将原始点云转化为服务于可达性分析与结构约束的语义空间模型
[Aksu 和 Demirel 2024][Extracting Structural Elements From 3D Point
Clouds in Indoor Environments via Machine Learning Techniques];[Balado
等 2017][Automatic building accessibility diagnosis from point
clouds];[He 等 2019][Furniture Free Mapping using 3D Lidars]。
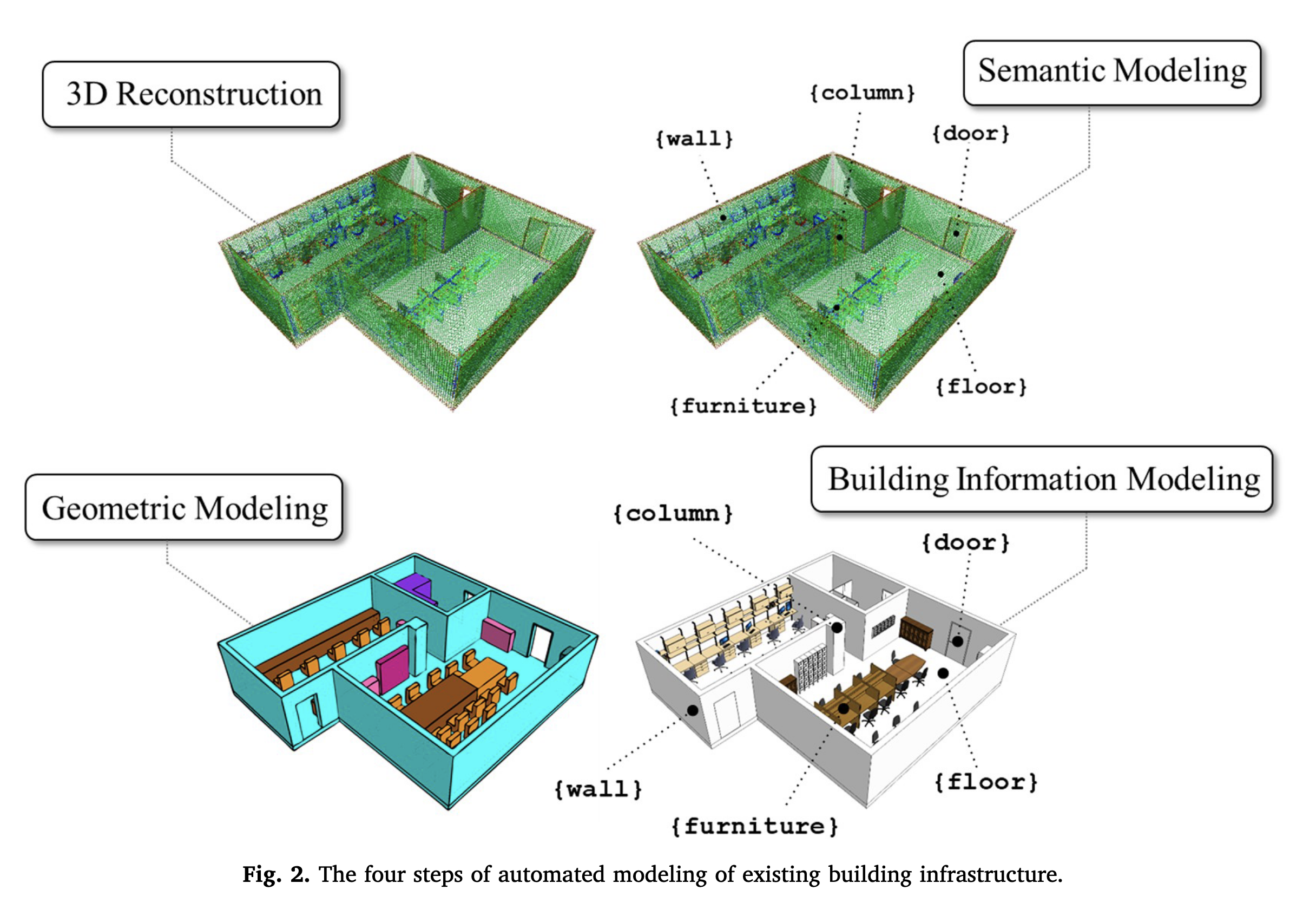
从自动化视角,[Czerniawski 和 Leite 2020][Automated digital modeling
of existing buildings: A review of visual object recognition methods]
对过去十年基于视觉和点云的自动建模研究进行了系统梳理,指出当前方法的语义覆盖非常有限,主要集中在地面、墙、顶板、门窗等少数类上,要实现对建筑内部基础设施和设备的全面识别仍需大幅扩展。这也从反面说明:若应用只依赖于上述少数“骨架类”对象(正是机器人通行和布局生成所需的那批),则
Scan‑to‑BIM 的自动化程度和可靠性已相对较高。
image-20251120134347037
图31 2020年的文献综述,综合论述了基于视觉和点云的自动建模
更广义上,[Drobnyi 等 2023][Construction and Maintenance of Building
Geometric Digital Twins: State of the Art Review] 将 Scan‑to‑BIM
视为构建建筑几何数字孪生的核心技术之一,指出当前自动建模的主要瓶颈包括:
在几何重建方面,[Xiong 等 2013][Automatic creation of semantically
rich 3D building models from laser scanner data]
提出从多站点云出发,先体素化并提取平面片段,再利用几何特征和上下文关系自动将平面分类为墙、顶板、地面等,并进一步检测并拟合门窗等开口,通过可见性推理和
3D inpainting 处理遮挡,最终自动生成包含墙、地、顶、门窗的语义 3D
模型。
[Jung 等 2016][Automated 3D Wireframe Modeling of Indoor Structures
from Point Clouds Using Constrained Least-Squares Adjustment for
As-Built BIM] 则通过:
1、将点云投影为二维二值图像,追踪并正则化墙体边界;
2、结合 RANSAC 高度估计获得三维墙体;
3、在墙面投影图上识别空洞区域作为窗洞、门洞; 生成精度约 6–7 cm 的
3D 线框模型,并以此为参照生成 as‑built BIM。
更注重流程完整性的工作包括:
[Macher 等 2017][From Point Clouds to Building Information Models:
3D Semi-Automatic Reconstruction of Indoors of Existing Buildings]
提出地面/顶板/墙体的多级分割与 IFC
模型重建流程,属于典型的半自动 Scan‑to‑BIM;
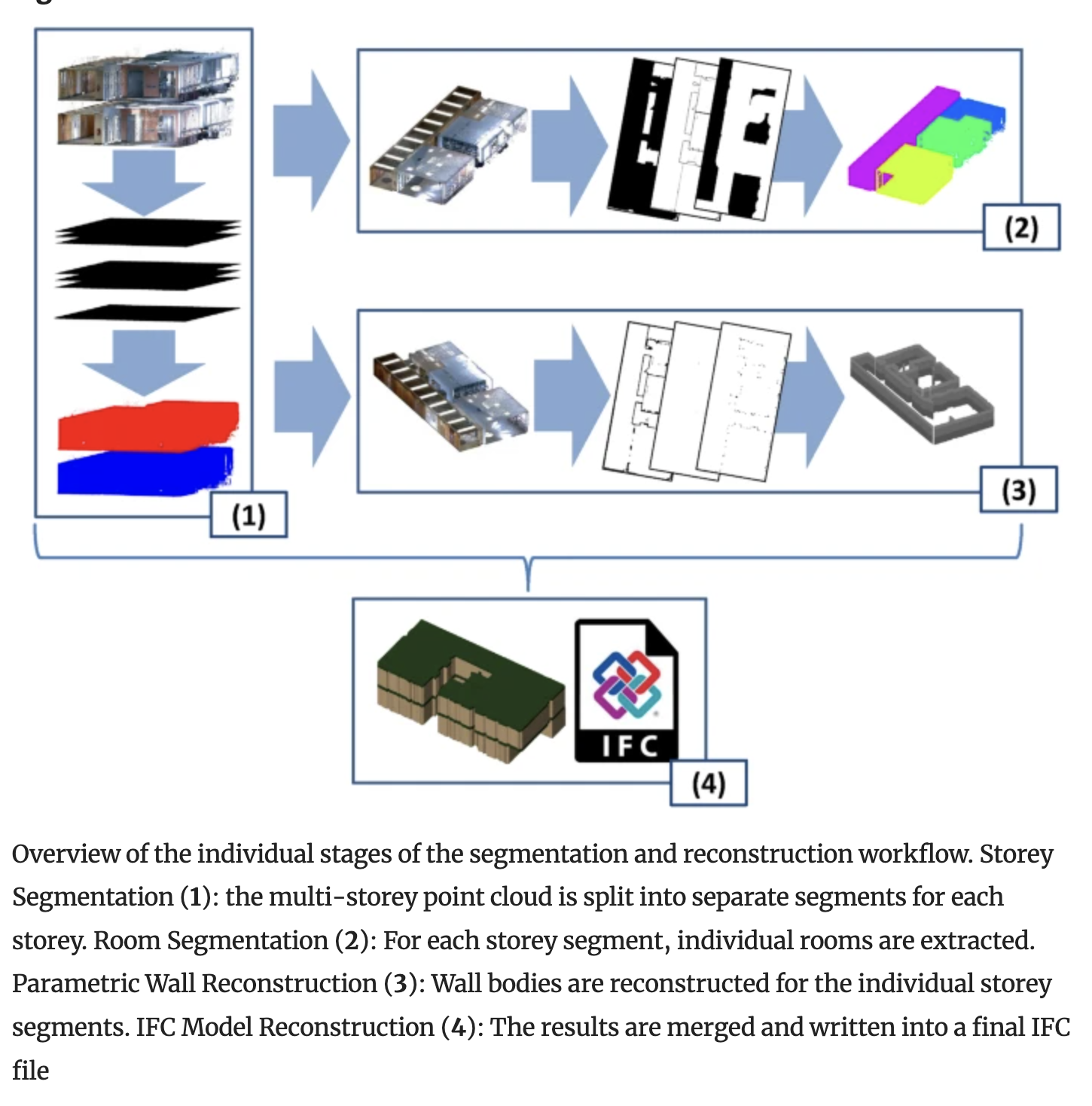
[Martens 和 Blankenbach 2023][VOX2BIM+-A Fast and Robust Approach
for Automated Indoor Point Cloud Segmentation and Building Model
Generation] 采用体素化 +
平面切割实现楼层与房间分割,再提取房间边界并重建体积墙体,最终输出
IFC,验证了在多种采集方式与噪声条件下的鲁棒性。
image-20251120140344406
图33 主要应用于现代建筑结构
针对墙体这一核心构件,[Bassier 和 Vergauwen 2020][Unsupervised
reconstruction of Building Information Modeling wall objects from point
cloud data] 提出无监督墙体 BIM
对象重建方法,可同时处理多层结构、不同墙轴和连接形式,直接生成带拓扑关系的墙体对象。
在语义分类层面,[Bassier 等 2019][Classification of sensor independent
point cloud data of building objects using random forests]
采用随机森林对预分割的平面片段进行分类,将其标注为地面、顶板、屋顶、墙体和梁,整体识别率达
87%,平均精度
85%,并且不依赖于具体传感器或场景先验,适合多种既有建筑类型。
image-20251120140827893
图34 无监督方法形成的带拓扑关系的墙体对象
随着深度学习的发展,Scan‑to‑BIM
的自动程度与语义深度显著提升:
[Park 等 2022][Deep Learning-Based Automation of Scan-to-BIM with
Modeling Objects from Occluded Point Clouds] 在室内点云上进行 13
类对象的语义分割,并利用对象空间关系修正包围盒,从 BIM
库中自动匹配并生成 BIM 对象,显著提升遮挡场景下对象建模精度;
image-20251120141221678
图35 在识别结构基础上,增加了对家具的识别
[Mahmoud 等 2024][Automated BIM generation for large-scale indoor
complex environments based on deep learning]
构建了基于点云的深度网络用于大尺度复杂室内的语义分割,配合 Revit
参数化脚本自动重建曼哈顿/非曼哈顿场景中多房间的结构与非结构元素,Precision/Recall/F1
均达 96–99%;
image-20251120141624571
图36 通过深度学习+语义分割的方法来踢去房间中的非结构元素
[Kim 等 2023][Deep Learning-Based Automated Generation of Material
Data with Object-Space Relationships for Scan to BIM]
则在几何建模基础上,引入全景图像的语义分割,将材质信息与几何对象通过空间关系自动关联,自动生成同时包含几何与材质的
as‑built BIM,大幅提升材质标注的准确率。
image-20251120142029747
图37
化用二维全景图像理解的优势,通过分析图像的语义反过来提高点云语义分割的精确性
在数据预处理层面,[Qiu 等 2022][An adaptive down-sampling method of
laser scan data for scan-to-BIM]
指出,大规模点云的数据冗余会影响后续分割与建模效率。其提出的自适应下采样方法通过几何与语义双重筛选保留边缘点和带有语义标签的关键点,对四个不同精度场景测试表明,相比体素法和曲率法,能在显著减少点数的同时更好地保留几何与语义信息,生成的
as‑built BIM 在几何和语义精度上均更优。
[Lagüela 等 2014][Non-destructive approach for the generation and
thermal characterization of an as-built BIM] 利用 TLS
点云重建建筑几何,并结合红外热像与能量平衡分析得到围护结构的 U
值,将热工性能写入以 gbXML 表达的 as‑built BIM
中,为建筑性能分析提供真实热属性;
[Lagüela 等 2013][Automatic thermographic and RGB texture of
as-built BIM for energy rehabilitation purposes]
进一步提出将激光扫描、红外热像与 RGB 图片自动贴图到 BIM
中的流程,使模型既承载几何,也反映构件病害与能耗薄弱环节,显著提升面向能效改造的可视化诊断能力;
[Ham 和 Golparvar-Fard 2015][Mapping actual thermal properties to
building elements in gbXML-based BIM for reliable building energy
performance modeling] 则提出将实测热阻自动映射到 gbXML 元素的方法,缩小
BIM 设计值与既有构件真实性能之间的差距,提高能耗模拟可靠性。
针对近零能耗改造,[Zhao 等 2021][Digital-Twin-Based Evaluation of
Nearly Zero-Energy Building for Existing Buildings Based on Scan-to-BIM]
将 Scan‑to‑BIM 与建筑能耗模型(BEM)及数字孪生概念结合,构建了基于点云的
nZEB 改造评估框架,通过 Scan‑to‑BIM 快速建立既有建筑
BEM,评估多种改造方案在能耗、光伏发电与碳减排方面的效果。
在更综合的环境与健康影响评估上,[Kim 等 2023][An Integrated
Assessment Framework of Economic, Environmental, and Human Health
Impacts Using Scan-to-BIM and Life-Cycle Assessment in Existing
Buildings] 将 Scan‑to‑BIM
与全生命周期评估(LCA)结合,提出自动从点云生成误差率约 1.44% 的 BIM
模型,再基于 BIM
信息自动推算经济成本、环境负担与人体健康影响,实现对既有建筑改造方案的三重评价。
在建筑评估与运维层面:
[Mellado 等 2020][Digitisation of existing buildings to support
building assessment schemes: viability of automated sustainability-led
design scan-to-BIM process] 探讨了利用 Scan‑to‑BIM 支持 BREEAM、LEED
等绿色评价体系的可行性与流程;
[Mohamed 和 Marzouk 2021][Building condition assessment using
artificial neural network and structural equations] 构建了一个融合
Scan‑to‑BIM、人工神经网络与结构方程模型的建筑物理状况评估框架,用于预测构件未来劣化状态与维护优先级;
image-20251120151743430
图38 融合Scan-to-BIM的建筑物评估框架
[Cho 等 2024][Preliminary Assessment Method for Structural
Performance (PAMSP) of RC Rahmen Structure Building during Scan-to-BIM
Procedure] 利用 Scan‑to‑BIM
产生的点云数据,自动评估混凝土框架建筑表面裂缝、水平与竖向挠度三个关键指标,构建基于点云的结构性能初评方法。
从数字孪生视角,[Banfi 等 2022][Digital Twin and Cloud BIM-XR
Platform Development: From Scan-to-BIM-to-DT Process to a 4D Multi-User
Live App to Improve Building Comfort, Efficiency and Costs] 提出了从
Scan‑to‑BIM 到数字孪生(DT)的完整流程,通过高 LOD/LOI 的 HBIM 与
Revit/Forge API 实现云 BIM 与 XR
平台,支持多用户实时交互与能耗改造项目管理。 [Longman 等 2023][Digital
Twin for Monitoring In-Service Performance of Post-Tensioned
Self-Centering Cross-Laminated Timber Shear Walls] 则通过 Scan‑to‑BIM 将
LiDAR 点云转化为 BIM,并将结构健康监测传感器数据集成到 BIM 中,构建面向
CLT 剪力墙服役性能监测的数字孪生。
[Skrzypczak 等 2022][Scan-to-BIM method in construction: assessment
of the 3D buildings model accuracy in terms inventory measurements]
以三栋建筑为例,通过实测尺寸与 TLS/BIM
模型对比分析指出,在合理布站和建模流程下,建筑数字模型尺寸误差可控制在
±1 cm 内,足以支持建筑测绘与 BIM 重建。 [Esfahani 等 2021][Quantitative
investigation on the accuracy and precision of Scan-to-BIM under
different modelling scenarios]
则系统评估了不同建模自动化程度与建模者训练水平对 Scan‑to‑BIM
精度与精确度的影响,建立了对应的定量模型,为根据精度需求选择合适建模策略提供了依据。
在 LOD/LOI 与价值之间的平衡方面,[Suprun 等 2022][Digitisation of
Existing Water Facilities: A Framework for Realising the Value of
Scan-to-BIM] 通过水厂案例分析了不同 LOD/LOI
对运维应用价值与成本的影响,提出了基于应用需求分层选择 LOD/LOI
的框架。这对本文尤其重要:我们只需支持机器人导航与改造决策,因此可以在几何上聚焦墙、门、地面与大件家具,在信息上聚焦尺寸与空间关系,而不必追求面向全生命周期运维的高
LOD/LOI。
在质量控制方面,[Ariza-López 等 2019][Quality Control of “As Built”
BIM Datasets Using the ISO 19157 Framework and a Multiple Hypothesis
Testing Method Based on Proportions] 将 ISO 19157 地理信息质量标准引入
BIM
数据集的质检,构建基于多重假设检验的统计质量控制方法,并在一栋含地下车库、商铺与公寓的住宅建筑上进行示例,最终因多项质量指标不达标而“拒收”该
as‑built BIM。该研究说明了通过抽样 + 统计检验评价 Scan‑to‑BIM
结果可信度的必要性。
[Han 等 2021][Vectorized indoor surface reconstruction from 3D point
cloud with multistep 2D optimization]
提出一种不依赖曼哈顿/亚特兰大假设的室内矢量化重建多步管线。方法首先通过语义分割识别永久性结构(地面、顶棚、墙体及柱),随后将点云投影到平面,利用整数线性规划(ILP)从候选墙段中选择最优子集生成平面图,构造二维“排列”(arrangement),并在其上通过
MRF
标注恢复地面与顶棚;最后,将二维边界“抬升”到合适高度,得到完整三维墙体结构。实验表明,该方法在精细
LiDAR
点云和缺陷严重的图像重建点云上均可获得紧凑且精度较高的向量化模型。
这一从“点云 → 2D 优化 → 3D
墙体”的模式,为本文后续将墙体投影到平面进行布局搜索、再映射回三维仿真环境提供了直接的技术参照。
[Ochmann 等 2019][Automatic reconstruction of fully volumetric 3D
building models from oriented point clouds]
则提出了一种基于整数线性优化的体积型墙体重建方法:
[Martens 和 Blankenbach 2023][VOX2BIM+-A Fast and Robust Approach
for Automated Indoor Point Cloud Segmentation and Building Model
Generation] 在 VOX2BIM 基础上,提出了一个从点云到 BIM
的快速自动化流程:
针对这一问题,[Chen 等 2025][Reconstructing compact building models
from 3D indoor point cloud with curved surfaces via global energy
optimization]
提出了一个面向曲面场景的室内重建方法:
在住宅与公共建筑无障碍设计中,“门要宽到能让轮椅通过”是常见表述,但“多宽才算够宽”常被模糊处理。[Jeter
2016][“NO HANDICAPPED PEOPLE ALLOWED”: THE NEED FOR OBJECTIVE
ACCESSIBILITY STANDARDS UNDER THE FAIR HOUSING ACT]
以美国《公平住房法》(FHA)为例指出:
在公共交通领域,门宽与高度差等因素被证明会直接影响系统的运行效率与可达性。[Karekla
和 Tyler 2012][Reduced dwell times resulting from train-platform
improvements: the costs and benefits of improving passenger
accessibility to metro trains]
以伦敦地铁为例,构建仿真模型分析列车与站台之间的高差(step
height)、车门宽度(door width)以及二者的组合对列车停站时间(dwell
time)与线路周转效率的影响。结果显示:单独改善高差或门宽均可缩短乘客上下车时间;同时改善高差与门宽的方案虽成本最高(需抬高站台、更新车体),但对整体运行周期的缩短效果最显著。这一研究表明:“门宽
+
高差”不仅是无障碍问题,还是影响系统效率的关键几何变量;适当增加门宽,可以在不改变乘客人数的前提下提高流通能力。
从整体可达性评价视角,[Bhuiya 等 2023][Measuring accessibility of
movement challenged persons during earthquake evacuation of Dhaka City,
Bangladesh: A participatory GIS-Based approach]
针对达卡市行动受限人群(PMDs),构建了一个多维可达性评价框架,包括:从住宅到避难所的可达性、避难线路的可达性感知、避难所入口的可达性、住宅建筑内部流线与入口的可达性感知。研究基于
455 份问卷的参与式 GIS
数据,发现:多数评价维度和整体可达性状况较差,其中约 45.2%
的行政区在地震疏散可达性上表现“相对较差”;残障程度越高、年龄越大,越倾向于认为内部流线与入口门洞“不好走、不好进”;男性和受教育程度更高的
PMDs
对内部流线与入口的可达性感知略高。这一研究提示:住宅建筑的内部通道宽度、转弯空间和入口门洞几何条件,不仅影响日常使用,还在紧急疏散中对弱势群体造成实质性安全风险;对可达性的评价需要同时纳入“客观几何条件”和“使用者主观感知”。
3、本文在设定通行几何阈值与评价指标时,可借鉴 ISO 7176
系列中关于门宽、通道宽度和转弯空间的要求,将其转化为机器人仿真中的硬约束或下限标准。
小结:从无障碍标准到“机器人友好型”空间指标
综合上述文献,可以总结出几条与本文直接相关的认知:
无障碍标准需要“落到数字”:[Jeter 2016][“NO
HANDICAPPED PEOPLE ALLOWED”: THE NEED FOR OBJECTIVE ACCESSIBILITY
STANDARDS UNDER THE FAIR HOUSING ACT]
强调,没有客观门宽/通道标准的“可达性”会沦为意见之争;对应到机器人友好型住宅,必须明确门洞净宽、有效通道宽度、转弯空间等可测量几何阈值,而非仅以“机器人可以通过”笼统表述。
门宽 / 高差既关乎无障碍,也关乎系统效率[Karekla 和
Tyler 2012][Reduced dwell times resulting from train-platform
improvements: the costs and benefits of improving passenger
accessibility to metro trains]
证明了门宽与高差改善能显著降低车站停靠时间;类比到住宅,适度增加门洞与通道宽度、消除门槛/高差,有望减少机器人“卡门”“反复调整”的时间与碰撞风险,提高整体任务执行效率。
住宅入口与内部流线直接影响弱势群体安全与可达性:[Bhuiya
等 2023][Measuring accessibility of movement challenged persons during
earthquake evacuation of Dhaka City, Bangladesh: A participatory
GIS-Based approach]
将住宅入口与内部流线视为地震疏散可达性的关键子指标;老旧住宅狭窄走廊与偏小门洞不仅对机器人不友好,也对老年人和行动受限者构成安全隐患。
自动平面生成最早多从“约束满足 +
优化”的思路出发,将传统建筑师在概念设计阶段的平面推演形式化为可计算问题。[Laignel
等 2021][Floor plan generation through a mixed constraint
programming-genetic optimization approach]
在给定外轮廓和功能房间列表的前提下,将住宅平面离散为栅格单元,通过约束规划与遗传算法耦合求解单元分配问题,同时考虑房间面积、形状、相邻关系与走廊连通性等建筑与功能约束。实验表明,该方法可以在约
1
分钟内生成多套在建筑学上可接受的平面方案,并通过优化函数在候选方案间进行筛选。该研究将“房间划分
+走廊生成”视为组合优化问题的做法,为本文后续基于规则与启发式在既有户型内部搜索改造方案提供了直接方法论参照。
在复杂公共建筑方向,[Gavrilov 等 2020][Computer-aided approach to
public buildings floor plan generation. Magnetizing Floor Plan
Generator]
探索了面向公共建筑的平面自动生成算法,通过分析大量既有公共建筑平面中交通空间的结构模式,提出“磁性”平面生成器,将主要功能空间视为“磁极”,以吸引和组织周边次要空间与交通空间。尽管对象为公共建筑,但其以“空间之间的吸引/排斥关系”驱动平面生长的思路,可以类比为住宅中起居室、厨房、卧室等空间之间在功能上“相互拉扯”的关系,为后续在约束既有承重墙和管线的前提下进行局部平面调整提供启发。
在存量更新与适应性再利用方面,[Paulino 等 2023][A Grammar-Based
Approach for Generating Spatial Layout Solutions for the Adaptive Reuse
of Sobrado Buildings]
针对巴西历史城市中心的传统“sobrado”住宅,构建了一套形态文法规则,用于将原本单户住宅改造为多户公寓。文法中显式编码了结构约束(如楼梯位置、承重墙)与空间使用需求(如不同户型组合、采光要求),通过应用不同规则序列生成多种改造布局方案,并在三个案例中进行了验证。该研究说明,形态文法在处理“保留既有结构
+
适应新功能”的改造情景时具有天然优势,与本文“在既有老旧住宅结构框架下,通过有限改造动作实现空间适应性提升”的目标高度契合。
从更大尺度的居民点布局来看,[Guo 等 2020][Suitability Evaluation and
Layout Optimization of the Spatial Distribution of Rural Residential
Areas] 基于最小累积阻力模型与加权 Voronoi
图,对郑州农村居民点的空间适宜性与布局优化进行了研究,并提出城市化、重点发展、控制发展与合并迁移四类优化策略。[Zhao
等 2021][Public Space Layout Optimization in Affordable Housing Based on
Social Network Analysis]
则在保障性住房小区尺度上,以社会网络分析方法评价公共空间的连通性、聚集性与小世界特征,并根据节点使用频次和网络指标提出公共空间布局优化策略。尽管尺度不同,这些研究共同强调:空间布局优化不只是几何问题,而是需要嵌入使用行为与结构约束的综合问题,这一点也将体现在本文对“机器人友好型改造布局”的目标设定上。
数据驱动与深度学习的住宅平面自动生成
近年来,随着大规模平面数据集的出现,基于深度学习的平面生成成为住宅平面自动化的重要方向。[Wu
等 2019][Data-driven Interior Plan Generation for Residential Buildings]
提出一种模仿人类设计流程的两阶段数据驱动方案:首先在给定建筑外轮廓下,通过学习网络先定位起居室,再迭代生成其他房间,形成功能分区布局;随后采用编码–解码网络生成墙体,再通过规则将像素级结果转化为矢量化墙线。为支持训练,作者构建了
RPLAN
数据集,包含大量来自真实住宅建筑的手工标注平面。用户研究与定量比较表明,该方法生成的平面在合理性和多样性上显著优于既有方法,部分方案已接近人工设计水平。
在面向大尺度多户型平面分析方面,[Pizarro 等 2023][Large-scale
multi-unit floor plan dataset for architectural plan analysis and
recognition] 提出了包含 954
张高分辨率住宅建筑平面图的大型数据集,并提供墙体与楼板的多边形标注,同时实现了基于
U-Net
的墙体语义分割与向量化算法,为后续平面理解和生成模型提供了基线。[Kim 等
2021][Automatic Extraction of Indoor Spatial Information from Floor Plan
Image: A Patch-Based Deep Learning Methodology Application on
Large-Scale Complex Buildings] 则提出基于 CNN
的补丁式平面分析框架,通过将大尺度平面切分为统一尺度的图像块进行对象检测,再聚合为整体结果,并输出适配三维建模的矢量化对象,证明了深度学习方法在复杂大体量建筑平面解析中的可行性。
平面生成不但可以学习“几何模式”,还可以间接学习“性能偏好”。[Wan 等
2022][A Deep Learning Approach toward Energy-Effective Residential
Building Floor Plan Generation] 基于 Pix2Pix
框架构建了包括功能分区布局与建筑平面生成两级网络,以太阳十项全能竞赛的高能效住宅平面为样本集,训练网络在给定外轮廓下生成兼顾空间分配与能耗表现的住宅平面。对三个既有住宅案例的仿真结果显示,在外形相同的条件下,网络生成方案的年度能耗较原方案分别降低
13.38%、12.74% 和
7.47%。该研究表明,若训练数据具有清晰的性能特征,平面生成网络可以在某种程度上学习到“空间配置与能耗表现之间的隐含关系”。
在更通用的生成建构中,[Chen 等 2020][Intelligent Home 3D: Automatic
3D-House Design from Linguistic Descriptions Only]
将居住空间设计形式化为“自然语言到三维住宅模型”的生成任务,提出 House
Plan Generative
Model(HPGM),通过将语言描述映射为结构图,再由图条件布局预测网络生成平面布局,最后由语言条件生成对抗网络合成室内纹理,输出完整三维住宅模型,并构建了首个
Text-to-3D House Model
数据集。这一工作展示了将用户高层次语义需求(语言)与空间几何生成直接打通的可能性,为未来将“机器人运行需求”以语义约束形式嵌入生成网络提供了想象空间。
然而,数据驱动与生成模型在建筑领域的有效性与“建筑学合理性”仍需谨慎评估。[Park
等 2024][Quality assessment of residential layout designs generated by
relational Generative Adversarial Networks (GANs)]
收集了八万余张建筑师绘制的住宅平面,与采用最先进生成模型产生的相似规模平面进行对比,从“共享/私密空间面积分布、隐私–可见性、空间连通性”等多维指标评价其合理性。结果表明,现有生成模型在这些隐含建筑规则上与真实项目存在显著偏差,说明仅靠数据驱动尚难完全捕捉真实住宅布局中的潜在设计原则,亟需引入领域特定指标与评价体系。这一发现对本文具有重要启示:在“机器人友好型住宅平面生成”中,不能单纯依赖数据统计模式,而应显式引入可达性、安全性等具身代理相关指标,作为评价与优化的内在标尺。
家具布局、微观空间与居住体验优化
在室内尺度上,家具布局是联结“几何空间”和“使用体验”的关键中介,也是直接影响机器人通行与转弯空间的要素。[Abdelmohsen
等 2017][A Heuristic Approach for the Automated Generation of Furniture
Layout Schemes in Residential Spaces]
提出了一种面向住宅空间的家具自动布局启发式算法,基于对“家具实体、空间构型与空间要素”的操作性定义,通过空间细分规则、物–物关系与物–空间关系生成客厅家具布局方案。借助
Grasshopper
平台,作者展示了在给定房间几何与入口位置条件下,算法可生成多种具有一定居住合理性的家具布置,为将“家具视为可布置对象”而非背景前提提供了方法基础。
在小户型方向,[Gronostajska 和 Szczegielniak 2021][Inside a
Microapartment: Design Solutions to Support Future Sustainable
Lifestyles] 选取 30 套建筑面积小于 35 m²
的欧洲微型公寓,对其室内设计方案进行比较分析,总结了在空间布局、家具布置、色彩与材料等方面支持可持续生活方式的典型策略。研究表明,高效的空间利用往往依赖于多功能家具、可变隔断和高度集成的收纳系统,这与老旧小户型在改造中面临的“如何在有限体量内兼顾使用、收纳与通行”的问题高度一致。
疫情背景下的居家办公实践也揭示了现代住宅在空间适应性上的不足与潜在改进方向。[Hiyasat
等 2023][Use of work-space at home under COVID-19 conditions in the UAE]
通过 113
份问卷调查阿联酋居民在疫情期间对居家工作空间的临时改造行为,发现居住类型、室内空气质量、自然采光条件与家具布局调整对工作满意度、生产力感受有显著影响。许多受访者表示会在恢复线下办公后继续保留疫情期间对家具布局与色彩的调整,表明住宅室内空间在使用过程中存在持续的“微更新”需求。
此外,大量研究从热环境与通风角度考察家具布局与开窗方式对室内性能的影响。[Medshinge
等 2020][A Study on the Effectiveness of Wind-Induced Natural
Ventilation and Shading Analysis on a Residential Apartment Typology]
利用物理模型研究印度典型住宅单元在不同风向和开窗方式下的多区自然通风效率,并在考虑结构、交通与家具布置的前提下,通过改变开口、遮阳、翼墙等细部提高各单元的通风可达性。[Jayasree
等 2022][The effect of opening windows on the airflow distribution
inside naturally ventilated residential bedrooms with ceiling fans]
通过数值模拟与实测相结合的方式,分析不同开窗模式对带吊扇卧室内气流分布的影响,指出开窗位置与家具布置会明显改变风速分布与舒适度;[Nazmy
等 2023][Spatial Factors Related to Occupants’ Behavioral Beliefs About
Window and Blind Use in Multifamily Residential Buildings]
则从行为视角,研究了户型朝向、楼层、空间类型与家具布局等空间因素对多户住宅住户开窗、调节遮阳行为信念的影响,强调在前期空间规划中需充分考虑空间因素对节能行为的触发作用。
第一,基于约束规划、进化算法与形态文法的平面生成方法已经能够在给定外轮廓和功能需求下,生成满足面积、相邻与结构约束的可用方案,且已开始服务于存量建筑的适应性再利用与改造决策[Laignel
等 2021][Floor plan generation through a mixed constraint
programming-genetic optimization approach];[Paulino 等 2023][A
Grammar-Based Approach for Generating Spatial Layout Solutions for the
Adaptive Reuse of Sobrado Buildings]。
第二,数据驱动与深度学习方法通过大规模平面数据集的支持,能够学习住宅空间的统计模式,自动生成在功能分区、墙体分布等方面较为合理的平面,并且可以在一定程度上嵌入能耗等性能目标[Wu
等 2019][Data-driven Interior Plan Generation for Residential
Buildings];[Wan 等 2022][A Deep Learning Approach toward
Energy-Effective Residential Building Floor Plan
Generation]。然而,现有生成模型在隐性建筑规则(隐私、层级、流线等)上的把握仍不充分,需要引入领域特定的评价指标与约束[Park
等 2024][Quality assessment of residential layout designs generated by
relational Generative Adversarial Networks (GANs)]。
第三,在室内细部层面,家具布局已被证明会显著影响空间利用效率、通风性能、能耗表现与居住者满意度[Abdelmohsen
等 2017][A Heuristic Approach for the Automated Generation of Furniture
Layout Schemes in Residential Spaces];[Gronostajska 和 Szczegielniak
2021][Inside a Microapartment: Design Solutions to Support Future
Sustainable Lifestyles];[Jayasree 等 2022][The effect of opening
windows on the airflow distribution inside naturally ventilated
residential bedrooms with ceiling fans];[Nazmy 等 2023][Spatial Factors
Related to Occupants’ Behavioral Beliefs About Window and Blind Use in
Multifamily Residential
Buildings]。由此,家具与微观空间配置理应被纳入空间优化的变量集合,而非仅作为静态前提。
大量设施布局问题可以抽象为二次指派问题(Quadratic Assignment
Problem,
QAP)或其变体,即在给定一组“设施”和一组“位置”时,寻求一种一一匹配,使加权距离或成本最小。[Tosun
2015][On the performance of parallel hybrid algorithms for the quadratic
assignment problem] 将遗传算法与禁忌搜索组合成并行混合算法,通过 GA
提供高质量初始解,再用 TS 深度局部搜索,处理 QAPLIB 中规模达 256
的实例,平均偏差仅 0.05%。[Dokeroglu 2015][Hybrid
teaching-learning-based optimization algorithms for the Quadratic
Assignment Problem]
则在教学–学习优化(TLBO)框架下引入重组算子和鲁棒禁忌搜索,同样取得接近最优的结果。类似地,[Abdel-Basset
等 2018][Integrating the whale algorithm with Tabu search for quadratic
assignment problem: A new approach for locating hospital departments]
将鲸鱼优化算法与禁忌搜索集成为 WAITS,用以求解医院科室布置的 QAP
模型,显著优于多种对比元启发式。
针对典型的走廊 / 双排布置问题,[Liu 等 2021][Mathematical
formulation and a new metaheuristic for the constrained double-floor
corridor allocation problem]
将双层走廊布置问题(DFCAP)形式化为带多种约束(楼层、行、位置、相邻等)的混合整数规划,并在此基础上提出一种约束元启发式框架,通过多条启发式规则构造初始解,再用模因算法改进,求解规模达
80 的实例。[Guan 等 2019][A flower pollination algorithm for the
double-floor corridor allocation problem†]
则为同类问题设计了基于花朵授粉算法(FPA)的离散元启发式,引入交换对集合的离散编码和邻域搜索,有效避免早熟收敛。[Liu
等 2022][Mathematical formulation and two-phase optimisation methodology
for the constrained double-row layout problem]
进一步将双排布置问题(DRLP)扩展为有约束版本(cDRLP),提出“离散差分进化
+
连续优化”的两阶段方法,先在离散空间中确定设施排序,再在连续空间精细调整坐标。
这些基于 QAP / CAP
变体的工作,共同展示了一个可借鉴的技术图景:通过合适的编码方式,将复杂空间布局抽象为“排列
+
连续参数”的混合决策,再采用分阶段、分层次的元启发式方法求解。对于本文拟采用的“平面网格
/ 走廊–门洞–家具组合布局”,这一思路完全可迁移。
在工业园区与化工设施尺度,[Wang 等 2021][A multi-objective
optimization method for industrial park layout design: The trade-off
between economy and safety]
将工业园区总布置建模为“经济性–安全性”双目标问题:一方面通过改进 FLUTE
算法优化管网经济成本,另一方面构建考虑气象不确定性的风险图,量化毒性泄漏风险,并利用
NSGA-II 求解 Pareto 解集。[Vázquez-Román 等 2010][Optimal facility
layout under toxic release in process facilities: A stochastic approach]
则在考虑有毒泄漏不确定性的基础上,将设施选址与布局问题建模为混合整数非线性规划,通过概率仿真与
Probit 函数评估死亡风险。
在绿色与低碳方向,[Choudhary 等 2015][A carbon market sensitive
optimization model for integrated forward-reverse logistics]
将碳排放纳入正向–逆向物流网络设计,通过改进森林数据结构与启发式算法,在成本与碳足迹之间寻找平衡。[Ren
等 2023][Research on design and optimization of green warehouse system
based on case analysis]
利用启发式算法与多目标模型,实现低碳仓储布局;[Mao 等 2023][Simulation
of Low Carbon Layout Optimization of Disassembly Line Based on SLP
Method]
则基于系统布置规划(SLP)与离散事件仿真,在拆解线布局优化中引入碳排放指标,并通过灰关联分析选取最优方案。
在安全与可持续性综合评价方面,[Azadeh 等 2013][A new approach for
layout optimization in maintenance workshops with safety factors: The
case of a gas transmission unit]
提出仿真–数据包络分析(DEA)一体化方法,将时间、等待、利用率等效率指标与安全指标共同纳入
DEA 模型,对不同布局方案进行排序;[Sagnak 等 2019][A new holistic
conceptual framework for layout performance assessment]
则构建了包含成本、物流、柔性、环境质量、安全等 7 个一级准则、19
个二级准则和 112 个细化指标的三维布局绩效评价框架,并通过模糊 DEMATEL
分析准则间因果关系。
多楼层和走廊布局方面,[Izadinia 和 Eshghi 2016][A robust
mathematical model and ACO solution for multi-floor discrete layout
problem with uncertain locations and demands]
提出不确定多楼层离散布局问题(UMFDLP),在地下一层设置主仓储,其他楼层布置生产部门,引入需求与位置不确定,并用混合整数规划和蚁群算法给出鲁棒解。[Liu
等 2021][Mathematical formulation and a new metaheuristic for the
constrained double-floor corridor allocation problem] 和 [Liu 等
2022][Mixed-integer programming model and hybrid immune clone select
algorithm for multi-objective double floor corridor allocation problem
with vertical conveyor] 则围绕双层走廊与垂直输送设备,提出多目标 DFCAP
模型和免疫克隆选择–变邻域搜索混合算法,兼顾物料搬运成本、楼层面积和电梯均衡利用。
动态与重布局方面,[Drira 等 2013][Design of a robust layout with
information uncertainty increasing over time: A fuzzy evolutionary
approach]
将随时间增长的信息不确定性显式引入布局优化问题,使用模糊进化算法获得在多期需求情景下均表现稳健的布局;[Keshavarzmanesh
等 2010][A hybrid approach for dynamic routing planning in an automated
assembly shop] 与 [Wang 2011][ALTERNATIVE SHOP-FLOOR RE-LAYOUT DESIGN
DUE TO DYNAMIC OPERATION CHANGES]
将车间重布局问题拆分为“重新布置模块”和“在既有布局内寻找新路径模块”,前者用
GA
决定整体重布置,后者用功能块与规则搜索机器人路径,以适应动态工况变化。
近年来,强化学习开始进入布局领域。[Klar 等 2023][A simulation-based
factory layout planning approach using reinforcement learning]
将强化学习智能体嵌入离散事件仿真环境,通过奖励函数直接以系统吞吐时间为优化目标,实现工厂布局的自动搜索与改进;[Klar
等 2023][Performance comparison of reinforcement learning and
metaheuristics for factory layout planning] 在三个不同规模问题上对 13
种强化学习算法和 7 种传统元启发式进行了系统对比,发现表现最好的 RL
算法在给定计算时间下可获得与最优或最优已知解相当甚至更优的结果,尤其在大规模问题中通过迁移学习展现出显著优势;[Klar
等 2024][Transferable multi-objective factory layout planning using
simulation-based deep reinforcement learning] 进一步提出多目标 RL
框架,将离散事件仿真结果(如在制品、物流清晰度、介质供应等)作为奖励信号,在多目标条件下生成可迁移的工厂布局模型。
这些研究共同指向一个趋势:在约束复杂、需求不确定和运行动态强的环境中,传统
GA / ACO / DE
等元启发式仍是主力,但强化学习逐步成为有潜力的替代或补充选择,尤其适合与仿真(离散事件或具身仿真)联用,实现“边试边学”的布局优化。对于本文未来将“具身机器人仿真”作为评价黑箱的情形,这种
RL + 仿真的模式具有高度可借鉴性。
在室内空间层面,[Kang 和 Kim 2022][Floor plan optimization for
indoor environment based on multimodal data]
提出了基于多模态数据的室内平面优化方法:利用手机 App
日志与服务器数据推断居民日常行为模式,再通过二维遗传算法在给定外轮廓与房间组合下搜索平面方案,以“生活成本”(包括动线长度、特定活动便利性等)最小化为目标;[Sun
2022][Design and Optimization of Indoor Space Layout Based on Deep
Learning] 将 3D
空间卷积神经网络、模糊神经网络与遗传算法相结合,构建对抗式室内空间布局优化算法,在主观评价中优于对比算法,并能在普通工作站上离线运行。
在疫情背景下,[Ugail 等 2021][Social distancing enhanced automated
optimal design of physical spaces in the wake of the COVID-19 pandemic]
将物理空间重新布置形式化为带社交距离约束的圆形 /
圆盘装填问题,通过约束优化为教室、办公空间等提供满足社交距离、防疫通道与通风要求的自动化布局方案。该方法本质上是在给定边界、障碍与通行空间的条件下,对“人”的占据位置进行复杂约束下的几何打包,与本文后续在既有住宅中为机器人与人预留安全缓冲距离的思路高度相似。
在平面–三维抽象层,[Hua 和 Dillenburger 2023][Packing problems on
generalised regular grid: Levels of abstraction using integer linear
programming] 提出在广义规则网格(GRG)上利用 0-1
整数规划求解多形状拼贴与相邻约束问题,并将其应用于高层住宅平面中功能单元与户型组合的规划,展示了从抽象格点到具体几何平面之间的可逆映射。
在建筑单体位置与方位优化方面,[Zawidzki 和 Szklarski
2020][Multi-objective optimization of the floor plan of a single story
family house considering position and orientation]
将单层独立住宅平面视为候选解集合,对每个平面在给定基地上搜索最优位置与朝向,并综合考虑功能性(用户定义)、日照、视野质量与噪声屏蔽四个目标,通过梯度法进行多目标优化。
在城市与开放空间层面,[Xu 等 2019][Performance-driven optimization
of urban open space configuration in the cold-winter and hot-summer
region of China] 采用 Grasshopper
平台和遗传算法,对南京典型城市街区开放空间布局进行多目标优化,以夏季与冬季的室外
UTCI
为性能指标,并通过两组案例验证“开敞空间布局与形态”对街区热舒适性的敏感性。[Zhou
等 2023][Optimization Methods of Urban Green Space Layout on Tropical
Islands to Control Heat Island Effects]
则以三亚为例,提出基于“绿地冷岛指数”的城市绿地布局优化模型,并利用遗传算法在约束总面积条件下最大限度降低热岛强度。
在医疗建筑与医院布局中,[Helber 等 2016][A hierarchical facility
layout planning approach for large and complex hospitals]
提出用于大型综合医院的分层布局规划方法,通过分级优化科室与病区位置,降低患者、物资在多栋建筑间的运输成本;[Cubukcuoglu
等 2022][Optimal Design of new Hospitals: A Computational Workflow for
Stacking, Zoning, and Routing]
将医院布局问题形式化为三步流程:楼层分配(stacking)、分区(zoning)与路线布置(routing),其中分区与路线在四边网格上建模为混合整数规划问题,借助成熟
OR 求解器获得最优结果。[Karki 和 Parikh 2024][Visibility-based layout of
a hospital unit - An optimization approach]
则从医护可视性角度,将护士站位置与病床朝向作为决策变量,构建双目标模型(最大化总体可视性、最小化可视性不均衡),并用多目标粒子群优化搜索
L 形、I
形与放射状单元的可视性最优布局,结果表明放射布局在可视性与公平性方面显著优于其他形态。
此外,[Pires 等 2021][Solving the grocery backroom layout problem]
将超市后仓视为不等面积设施布局问题,通过混合整数规划最小化员工在后仓的步行距离,相比现有人工布局平均减少步行距离
30%;[Wang 和 Guo 等 2020][Safe Three-Dimensional Assembly Line Design
for Robots Based on Combined Multiobjective Approach]
在机器人装配线三维布局设计中,将机器人作业包络体与协作安全距离显式建模,引入定量安全指标,并采用差分进化与
NSGA-II
组合算法在“物流成本、占地面积、安全性”多目标下进行优化,成功生成安全且高效的装配线布局。
一是,在设施 /
布局问题中,启发式与进化算法已经形成成熟谱系,从传统的 GA、TS、SA,到
FPA、BBO、ACO
及其岛模型、模因算法、混合差分进化与免疫算法等,并逐步与深度学习、强化学习结合。它们在
QAP、走廊布局、双排 /
多排、多楼层与复杂约束布局问题上表现出良好的求解能力[Tosun 2015][On the
performance of parallel hybrid algorithms for the quadratic assignment
problem];[Liu 等 2021][Mathematical formulation and a new metaheuristic
for the constrained double-floor corridor allocation problem];[Guan 等
2019][A flower pollination algorithm for the double-floor corridor
allocation problem†]。
二是,多目标布局优化已成为主流,经济成本、物料搬运、环境影响、安全风险、碳排放与可持续性等被共同纳入目标体系,多目标进化算法(NSGA-II、MOEA/D
等)在工业园区、仓储、拆解线、工业建筑等多类场景中得到验证[Wang 等
2021][A multi-objective optimization method for industrial park layout
design: The trade-off between economy and safety];[Ren 等
2023][Research on design and optimization of green warehouse system
based on case analysis];[Mao 等 2023][Simulation of Low Carbon Layout
Optimization of Disassembly Line Based on SLP
Method]。这为本文将“机器人可达性、安全性、改造量与环境表现”整合到同一优化框架中提供了方法基础。
三是,在动态与不确定条件下,模糊进化、分阶段 /
分层次混合启发式,以及近年来的深度强化学习,已被用于工厂重布局和多期决策,通常通过与仿真联用实现“生成–评估–改进”的闭环[Drira
等 2013][Design of a robust layout with information uncertainty
increasing over time: A fuzzy evolutionary approach];[Klar 等 2023][A
simulation-based factory layout planning approach using reinforcement
learning];[Klar 等 2023][Performance comparison of reinforcement
learning and metaheuristics for factory layout
planning]。这与本文计划采用具身机器人仿真作为评价黑箱、通过迭代搜索改造布局的逻辑高度一致。
四是,在建筑与住宅领域,虽然自动平面生成与深度学习方法(前文
3.1)已经可以构造“看起来合理”的住宅平面,但要将隐性的建筑规则和使用行为纳入其中,仍需借助显式的启发式与进化优化框架,将功能联系、行为轨迹、环境性能等多维指标转化为可优化的目标函数或约束[Zawidzki
和 Szklarski 2020][Multi-objective optimization of the floor plan of a
single story family house considering position and orientation];[Kang
和 Kim 2022][Floor plan optimization for indoor environment based on
multimodal data];[Ugail 等 2021][Social distancing enhanced automated
optimal design of physical spaces in the wake of the COVID-19
pandemic]。
在帮助认知障碍老年人的方向,[Gross 等 2011][I’ll keep an Eye on You:
Home Robot Companion for Elderly People with Cognitive Impairment]
介绍了欧盟 FP7 “CompanionAble”
项目中的家庭陪伴机器人原型,用于独居、轻度认知障碍老人的居家辅助。机器人需承担提醒(服药、饮水)、认知训练、移动视频通话以及跌倒监测等多类任务,因此必须具备稳健的用户检测与跟踪能力以及“以用户为中心”的室内导航。长期测试表明,该类机器人在辅助性与可用性方面具有潜力,同时也暴露了在狭窄房间和杂乱布局中导航的困难。
在“多机器人 + 智能家居”的场景下,[Barber 等 2022][A Multirobot
System in an Assisted Home Environment to Support the Elderly in Their
Daily Lives]
设计了一套由两类机器人组成的异构系统:一台小型移动机器人负责巡视与情绪干预,另一台移动操作机器人负责家务任务执行。整个系统与家庭自动化传感器、可穿戴设备和手机应用集成,通过语义分割的导航环境支撑任务规划。长期实测表明,多机器人系统可以协助老年人完成日常生活支持,并实时根据情绪状态推送活动建议。
针对严重行动障碍人群,[Wästlund 等 2015][Evaluating gaze-driven
power wheelchair with navigation support for persons with disabilities]
开发了基于眼动控制与导航辅助的电动轮椅附加系统,在用户家中开展试验,三位无独立移动能力的用户通过眼动控制与半自动导航实现了室内独立移动。研究表明,这类具备导航辅助能力的移动平台不仅提升了独立性和参与度,也为康复评估提供了新的观察窗口。类似地,[Luo
等 2021][NOVELTI 2.0: Enhanced Assistive Robot Navigation with Low
Throughput Interfaces] 提出的 NOVELTI 2.0
框架,面向低带宽人机接口(如脑机接口、单开关),通过共享控制实现带轮椅的室内精确导航,在真实环境中实现
5 cm 平均位置误差和 5°
朝向误差,且较传统转向控制在长路径上将导航时间与指令次数减少一半。
在智能家居测试床环境下,[Wang 等 2019][Finding misplaced items using
a mobile robot in a smart home environment] 提出一种利用“人类历史轨迹 +
机器人视觉”的遗失物品查找系统。系统基于多传感器融合实时定位与跟踪住户,利用住户历史行动轨迹估算物品可能位置,再通过路径规划引导机器人遍历高概率区域,并使用
CNN
检测目标物体。实验结果表明,引入“住户行为轨迹”可显著提高查找效率。这一思路提示,住宅导航不仅依赖几何地图,还可利用语义与行为信息构建“任务优先级地图”。
在导航地图表示方面,[Furuta 等 2016][Transformable Semantic Map
Based Navigation using Autonomous Deep Learning Object Segmentation]
提出一种“可变形语义地图”导航框架。机器人首先基于带标注的环境自动采集数据,并通过深度学习实现对象分割与语义标注,在此基础上建立语义地图;随后将已有的几何地图导航任务迁移到语义地图上,从而获得对家具移动具有不变性的导航表示。实验证明,在动态家庭环境中,该方法比单纯几何地图更具适应性。这为本文后续构建“可同时支撑几何约束与语义任务规划的一体化室内模型”提供了重要参照。
关于视觉定位与场所识别,[Jeon 等 2016][A BRIEF-Gist Based Efficient
Place Recognition for Indoor Home Service Robots]
指出,家居环境纹理与特征往往较少,使得传统基于局部特征的方法识别率偏低。他们提出基于二值鲁棒独立基础特征的
Gist
描述子(BRIEF-Gist)进行室内场所识别,通过从单幅图像中提取多组描述符并设计高效数据结构,在家庭场景中将
100% 精度下的召回率从 1.6% 提高到 9.7%,且单张图像处理时间降至 10.5
ms,为轻量化室内场所识别提供了一个可行方向。
针对室内走廊与门洞通行,[Pasteau 等 2016][A visual servoing approach
for autonomous corridor following and doorway passing in a wheelchair]
在无先验地图条件下,利用车载摄像机提取门框和走廊边缘的图像特征,构建基于图像的控制器实现自动沿走廊行驶与通过仅可见一侧门框的门洞。该方法无需详细环境建模,只依赖粗略标定,实验表明在典型室内环境中具有良好鲁棒性。对于老旧住宅中走廊狭窄、门洞开合频繁变化的情境,这种“弱地图
+ 强感知控制”的思路具有借鉴意义。
此外,多篇研究处理住宅及近住宅环境的定位与导航精度问题。例如
[Narvesen 和 Selekwa 2015][REDUCTION OF GPS NOISE FOR PRECISION CONTROL
OF ROBOT NAVIGATION IN CONFINED AREAS] 针对低成本单频 GPS
在居民车道与人行道场景中的噪声问题提出建模与滤波策略,用于户外家庭服务机器人(如自动扫雪机或割草机)的精确导航。尽管本文主要关注室内环境,但这体现了在住宅周边小尺度空间内对导航精度与成本权衡的普遍需求。
从社会化导航角度,[Kivrak 等 2021][Social navigation framework for
assistive robots in human inhabited unknown environments]
提出一套面向服务机器人的社会化导航框架,采用碰撞预测社会力模型(Collision
Prediction based Social Force Model,
CP-SFM)作为本地规划器,既考虑人群的运动状态,也生成符合人类习惯的“人友好”路径。研究针对低密度室内走廊环境,通过多级地图、障碍排斥点和改进的社会力模型实现了未知环境中的社会化导航。对本文而言,这类社会化导航框架可以自然延伸为“兼顾人–机器人空间安全距离”的布局评价标准。
在人机协同操控方面,[Dantanarayana 等 2014][A Novel Collaboratively
Designed Robot to Assist Carers]
在养老机构环境中与护理人员共同设计了“Smart
Hoist”助行提升机器人,用于转移行动不能的住户。机器人通过 RGB-D
传感器感知环境,生成与操作手输入叠加的“斥力”以规避碰撞,使搬运过程既安全又符合直觉。大量用户试验表明,该协同导航策略显著改善了操作者体验,减少了背部损伤风险。
面向低带宽交互,[Luo 等 2021][NOVELTI 2.0: Enhanced Assistive Robot
Navigation with Low Throughput Interfaces] 和 [Wästlund 等
2015][Evaluating gaze-driven power wheelchair with navigation support
for persons with disabilities]
分别通过共享控制、自动避障与半自主路径跟随,将用户输入简化为少量高层命令(如目标选择或粗略方向),导航细节由机器人接管,从而大幅降低用户的认知与操作负担。
从社交与交互层面,[Kivrak 等 2021][Social navigation framework for
assistive robots in human inhabited unknown environments] 和 [Barber 等
2022][A Multirobot System in an Assisted Home Environment to Support the
Elderly in Their Daily Lives]
的工作共同强调:服务机器人在住宅中运行时,路径规划需要综合考虑人的舒适度、可预见性与干扰最小化,而不仅是缩短路程或时间。这一点对本文至关重要,因为“机器人友好型布局”不能以牺牲人类居住舒适与隐私为代价,而应在“人—机器人—空间”的多主体共存中寻求平衡。
在任务规划与环境语义建模方面,[Wang 等 2020][Home service robot task
planning using semantic knowledge and probabilistic inference]
提出基于语义知识与概率推理的分层任务网络(Hierarchical Task Network,
HTN)规划框架。作者构建了物体位置本体、动态与静态物体之间的空间关系知识,以及对象–场景之间的概率模型,通过语义知识与概率推理确定目标物体位置,并将结果输入
HTN
规划器生成离散动作序列。同时引入任务执行诊断与重规划机制,以应对家庭环境的不确定性与信息不完备。仿真与真实家庭实验表明,该方法可显著提高任务规划的自主性与鲁棒性。
在自然语言指令理解方面,[Huo 等 2014][Using Spatial Language to
Drive a Robot for an Indoor Environment Fetch Task]
提出一套基于空间语言驱动机器人执行取物任务的系统。系统将语言解析为树状结构,识别出以家具与房间结构为参照的空间关系,并通过“参照–方向–目标(Reference-Direction-Target,
RDT)”模型将其映射为机器人动作序列。基于该模型构建的行为控制系统在真实室内环境中进行了实验验证,结果表明即使家具被重新布置,机器人仍能根据空间语言正确执行取物任务。
在多方参与的空间–语义规划方面,[Kathuria 等
2022][Providers-Clients-Robots: Framework for spatial-semantic planning
for shared understanding in human-robot interaction]
提出“服务者–客户–机器人(Providers-Clients-Robots,
PCR)”框架,用于社会辅助机器人在室内环境中的空间–语义规划。框架通过服务者与机器人共同构建多模态导航图,将环境表示为具有可解释空间–语义标记的图结构;随后由客户与机器人在交互中提出约束(时间预算、访问顺序),规划访问各兴趣区域的行动序列。实验表明,在给定约束下,该框架可生成优于贪婪基线的访问计划。
[Mehdi 和 Berns 2014][Behavior-based search of human by an
autonomous indoor mobile robot in simulation]
针对独居老人的居家照护场景,提出一套基于行为的室内机器人“找人”策略。系统维护一个随时间变化的“人在不同房间出现概率分布”,利用马尔可夫决策过程在考虑距离和当前位置概率的基础上推断最可能的目标位置,规划路径并在到达后进行视觉检测。作者在仿真公寓环境中引入动画人类模型,进行长期模拟,验证了该策略在“未观测但可推断”的情景下的有效性。
[Sinhg 等 2023][Sporadic Audio-Visual Embodied Assistive Robot
Navigation For Human Tracking]
在此基础上进一步提出“间歇音频–视觉融合”的人类跟踪策略。机器人利用声源方向(Direction
of
Arrival)和视觉估计的人体距离,对地图中各区域的人存在概率进行贝叶斯推断,即使声音是偶发或中断,也能保持对目标人的搜索能力。实验证明,虽然纯音频不足以单独定位人,但与视觉结合可显著降低搜索时间。
在语音交互方面,[Sontakke 等 2024][Mobile Bot Rotation Using Sound
Source Localization And Distant Speech Recognition]
提出一种用于移动机器人旋转控制的语音模块,包括远场语音识别与声源定位两部分。系统在
1、3、5
米采集远距离语音数据,训练远场识别器,并利用四麦克风环形阵列估计声音到达方向。模块集成到
ROS 并部署于
Turtlebot3,在混响室内环境下可在小型嵌入式计算平台上实现稳定运行。这类工作展示了在真实住宅尺度下,用“朝声音方向转身”这一直观行为连接语音交互与空间导航的技术途径。
在智能控制体系方面,[Song 和 Li 2021][Home Robot Control System
Based on Internet of Things and Fuzzy Control]
构建了基于物联网和模糊控制的家庭机器人控制系统,将上位机与底层运动控制器结合,并引入模糊逻辑实现全局路径规划与行为调度;[Pruss
等 2021][A BCI-controlled Robot Assistant for Navigation and Object
Manipulation in a VR Smart Home Environment]
则在虚拟现实智能家居中开发了基于 P300
脑机接口的机器人控制实验平台,让运动障碍用户通过 EEG
信号控制虚拟代理进行室内导航与物体操作。虽然后者仍处于 VR
阶段,但为未来在真实住宅中引入脑机接口控制提供了原型。
其一,典型任务从单一巡视扩展到物品查找、情绪干预、健康监测、远程通信、协助转移和独立移动支持等,涵盖老年人和残障用户的多层需求[Gross
等 2011][I’ll keep an Eye on You: Home Robot Companion for Elderly
People with Cognitive Impairment];[Barber 等 2022][A Multirobot System
in an Assisted Home Environment to Support the Elderly in Their Daily
Lives];[Wästlund 等 2015][Evaluating gaze-driven power wheelchair with
navigation support for persons with disabilities]。
其二,导航表示从传统几何地图发展到融合对象语义、房间功能和人类行为轨迹的语义地图与经验地图,能够在家具移动和环境变化下保持任务执行能力[Wang
等 2019][Finding misplaced items using a mobile robot in a smart home
environment];[Furuta 等 2016][Transformable Semantic Map Based
Navigation using Autonomous Deep Learning Object Segmentation];[Jeon 等
2016][A BRIEF-Gist Based Efficient Place Recognition for Indoor Home
Service Robots];[Pasteau 等 2016][A visual servoing approach for
autonomous corridor following and doorway passing in a wheelchair]。
其三,人机协同与社会化导航框架强调在家居环境中“与人共处”的路径规划与控制策略,通过社会力模型、共享控制和辅助接口设计,实现安全、舒适、低负担的移动[Kivrak
等 2021][Social navigation framework for assistive robots in human
inhabited unknown environments];[Dantanarayana 等 2014][A Novel
Collaboratively Designed Robot to Assist Carers];[Luo 等 2021][NOVELTI
2.0: Enhanced Assistive Robot Navigation with Low Throughput
Interfaces]。
其四,任务规划与空间语义方面,分层任务网络、语义知识本体、概率推理和多方参与的空间–语义规划框架,使机器人能够在不确定的家庭环境中根据高层任务、用户语言命令和服务者约束生成可执行行动序列[Wang
等 2020][Home service robot task planning using semantic knowledge and
probabilistic inference];[Huo 等 2014][Using Spatial Language to Drive
a Robot for an Indoor Environment Fetch Task];[Kathuria 等
2022][Providers-Clients-Robots: Framework for spatial-semantic planning
for shared understanding in human-robot interaction]。
其五,以寻找人、响应呼叫、语音方向导航和多模态交互为代表的“具身任务”研究,进一步强化了住宅布局与机器人行为之间的耦合关系:房间拓扑、门洞净宽、走廊宽度和家具布置直接决定了机器人执行“找人、送物、陪伴”等任务时的路径长度、搜索时间和安全性[Mehdi
和 Berns 2014][Behavior-based search of human by an autonomous indoor
mobile robot in simulation];[Singh 等 2023][Sporadic Audio-Visual
Embodied Assistive Robot Navigation For Human Tracking];[Sontakke 等
2024][Mobile Bot Rotation Using Sound Source Localization And Distant
Speech Recognition]。
在轮式移动机器人领域,[Li 等 2019][Navigation Simulation of a
Mecanum Wheel Mobile Robot Based on an Improved A* Algorithm in Unity3D]
在 Unity3D 上二次开发虚拟关节、虚拟 LiDAR 与三维地形脚本,将改进 A*
算法部署到麦克纳姆轮机器人虚拟模型中,在静态与动态障碍环境下进行导航仿真,并与实体机器人试验轨迹对比,展示了较高的一致性。这说明游戏引擎不仅可以进行视觉层面的仿真,也能较为精细地复现机器人运动学与传感器特性。
在高风险环境下的路径规划中,[Zheng 等 2024][Minimum dose path
planning method for virtual nuclear facilities based on navigation mesh]
在 Unreal Engine
中建立虚拟核设施和辐射剂量场,将路径规划建模为“累积剂量最小化”问题,提出基于导航网格的最小剂量路径规划方法。在显著减少网格数量与计算时间的同时,仍能获得剂量近似最优的路径。虽然该场景针对核退役设施,但其“在复杂三维空间中以安全指标为目标进行路径规划仿真”的思路,可以类比为住宅中服务机器人规避高跌落、湿滑区域的需求。
更贴近室内“类住宅”场景的工作中,[Tao 等 2017][PERCEPT Indoor
Wayfinding for Blind and Visually Impaired Users: Navigation
Instructions Algorithm and Validation Framework] 基于 Unity
构建与真实建筑拓扑一致的虚拟室内环境,将为盲人和低视力用户设计的导航指令转化为行动码序列,由虚拟化身在场景中执行,以检验导航算法的有效性。[Tao
等 2017][Indoor Navigation Validation Framework for Visually Impaired
Users] 和 [Tao 和 Ganz 2020][Simulation Framework for Evaluation of
Indoor Navigation Systems]
进一步提出面向室内导航系统的仿真验证框架,集成定位误差模拟、导航算法模块、虚拟用户模型与性能分析模块,可在纯虚拟环境下评估不同导航策略的成功率与路径相似度。
在特殊人群导航方面,[Al‑Fadhili 等 2018][3D Simulation of Navigation
Problem of People with Cerebral Visual Impairment] 使用 Unity3D
重建多种日常室内环境,并叠加基于患者视野检测图构建的视觉缺损滤波器,模拟脑性视觉损伤患者的视野受限导航行为,帮助医生和家属理解其在真实家庭环境中的通行困难。
[Liu 等 2017][A 2D and 3D Indoor Mapping Approach for Virtual
Navigation Services] 提出基于 3D
游戏引擎的室内二维/三维一体化制图方法,在后端利用 SVG
格式管理二维室内平面图,并自动生成三维虚拟场景;前端在 Unity3D
中实现室内建模与导航可视化。该方法实现了室内平面图与三维环境之间的自动映射,适合布局频繁变动的场所,为虚拟导航服务提供了易更新的环境模型。对本文而言,这种“平面–三维双向映射”的工作流可以直接迁移到“既有住宅点云–自动抽取得到平面–生成三维仿真环境”的链条中。
[Toledo‑Lopez 等 2022][Robust Decision Making via Cooperative
Estimation: Creating Data Saturated, Autonomously Generated, Simulation
Environments in Near Real-Time]
提出智能仿真模块,将半自主机器人平台采集的多源传感数据自动转化为 Unity3D
中的高保真数字孪生场景,实现近实时环境重建,用于作战工程任务中的路径规划与决策支持。系统通过
ROS–Unity
桥接,将真实机器人平台与虚拟环境联动,支持硬件在环、多机器人协同与虚拟现实监督,为由“机器人数据驱动仿真环境”提供了技术范式,这与本文拟利用住宅点云和传感数据自动构建老旧住宅仿真场景的设想高度契合。
在基于深度相机的室内建模方面,[Virtanen 等 2018][Depth camera indoor
mapping for 3D virtual radio play] 使用 Matterport
深度相机系统对历史建筑内部进行扫描,生成体素模型并导入游戏引擎,构建适用于“虚拟广播剧”的可交互三维场景。作者通过与高精度激光扫描数据对比,评估了
Matterport
模型的几何精度,并通过手工修订和模型简化使之适配实时渲染。该案例完整展示了从实际建筑空间到游戏引擎虚拟环境的工作流程,对本文从广州老旧住宅点云生成交互式仿真场景具有直接参考意义。
在更通用的自主系统训练方面,[Leudet 等 2019][AlLiveSim: An
Extensible Virtual Environment for Training Autonomous Vehicles] 基于
Unreal Engine 构建 AlLiveSim
平台,通过在引擎之上封装可扩展架构,使平台从面向汽车扩展到支持自主船舶和矿山机械等多种领域,并讨论了不同应用场景在仿真中的特殊需求。这表明,通过合理的系统设计,Unreal
可以作为跨领域、可扩展的通用仿真基座。
在城市尺度的环境重构中,[Reyes 和 Chen 2017][A 3D Virtual
Environment for Storm Surge Flooding Animation] 利用 Unity 将高程 GIS
数据与 OSM
建筑信息融合,重建真实城市街区的三维虚拟模型,用于暴潮淹没动画展示,并在沉浸式
I‑CAVE
系统中实现“人尺度”漫游。通过将环境模拟场(如水位、淹没深度)直接叠加在三维空间中,该工作展示了游戏引擎在复杂环境可视化与体验评估中的潜力。
在光环境与主观感知研究中,[Hegazy 等 2021][Evaluating and
visualizing perceptual impressions of daylighting in immersive virtual
environments] 与 [Hegazy 等 2022][An interactive approach to investigate
brightness perception of daylighting in Immersive Virtual Environments:
Comparing subjective responses and quantitative metrics]
利用游戏引擎作为日光模拟和沉浸式呈现平台,让参与者在虚拟室内空间中自由漫游,通过截屏与主观评价收集亮度感知数据,生成“主观亮度热力图”,并与多种客观光度指标对比。结果表明主观亮度感知与平均亮度的相关性最高,验证了游戏引擎在室内光环境主观评价中的适用性。
在复杂封闭空间可达性与舒适性评估方面,[Guida 和 Leoncini
2021][Regional Aircraft Interiors Evaluation in a Real Time Ray-Traced
Immersive Virtual Environment]
基于游戏引擎和实时光线追踪技术,构建飞机客舱虚拟环境,让参与者在沉浸式
VR
中体验不同座椅布局和照明组合对座位可达性和乘坐舒适性的影响,涵盖通道行走、就座、伸手触达等行为。这表明高保真虚拟环境可以用于复杂空间中“可达性
+ 舒适度”的综合评价,与本研究在住宅中同时考察“老人 / 轮椅 +
机器人”通行与居住舒适性具有高度可比性。
在建筑设计评审与交互方面,[Behmel 等 2014][MRI Design Review System:
A Mixed Reality Interactive Design Review System for Architecture,
Serious Games and Engineering using Game Engines, Standard Software, a
Tablet Computer and Natural Interfaces] 利用 Unity3D 等引擎和标准 3D
建模软件,开发混合现实设计评审系统,使非专业用户可以通过平板、触摸屏和自然交互在三维环境中自由导航、切换设计方案,降低建筑设计评审的门槛。这类系统说明,同一虚拟环境既能用于研究者进行技术性能评估,也能用于居民和设计师的主观体验与偏好反馈。
在虚拟行走与交互技术方面,[Mahalil 等 2019][Implementation of an
effective locomotion technique in Virtual Reality Stress Therapy]
比较了虚拟现实减压治疗场景中摇杆导航、引导导航和瞬移三种移动方式,对眩晕感与实现难度进行分析;[Zeng
等 2016][An interactive VR system based on full-body tracking and
gesture recognition] 基于 Kinect 与 Unity
实现全身跟踪与手势识别,使用户通过自然步行与手势进行虚拟导航和对象操控;[Rehman
等 2023][FPSI-Fingertip pose and state-based natural interaction
techniques in virtual environments] 基于 Leap Motion 在 Unity
环境中实现多种指尖交互策略,证明其在精细操作任务中的效率与可用性。虽然这些研究聚焦人机交互,但为未来在同一虚拟住宅环境中容纳
VR/AR 用户与虚拟机器人、共同评估空间布局和交互体验提供了技术基础。
第一,Unreal / Unity
在导航与路径规划验证中已被广泛应用,从视觉里程计算法 [Levinskis
2018][Using virtual environment for autonomous vehicle algorithm
validation],到基于 Unity 的改进 A* 导航 [Li 等 2019][Navigation
Simulation of a Mecanum Wheel Mobile Robot Based on an Improved A*
Algorithm in Unity3D],再到基于导航网格的最小剂量路径规划 [Zheng 等
2024][Minimum dose path planning method for virtual nuclear facilities
based on navigation
mesh],均表明游戏引擎能够在高保真环境中支持快速、可重复、可对比的导航算法测试。
第二,通过整合室内平面图、点云和机器人采集数据,游戏引擎可以承担数字孪生载体,实现从真实建筑空间到虚拟场景的高保真映射
[Liu 等 2017][A 2D and 3D Indoor Mapping Approach for Virtual Navigation
Services];[Virtanen 等 2018][Depth camera indoor mapping for 3D virtual
radio play];[Toledo‑Lopez 等 2022][Robust Decision Making via
Cooperative Estimation: Creating Data Saturated, Autonomously Generated,
Simulation Environments in Near
Real-Time]。这为本文建立“点云–二维平面–三维仿真环境”一体化工作流提供了技术基础。
第三,以 Unreal / Unity
为核心的仿真平台已成为深度强化学习与模仿学习的重要环境,支持程序化环境生成、多传感器建模与多智能体配置
[Bandela 和 Cao 2023][Drone Navigation in Unreal Engine Using Generative
Adversarial Imitation Learning];[Kalidas 等 2023][Deep Reinforcement
Learning for Vision-Based Navigation of UAVs in Avoiding Stationary and
Mobile Obstacles];[Kich 等 2024][Advancing Behavior Generation in
Mobile Robotics through High-Fidelity Procedural
Simulations];[Martinez‑Gonzalez 等 2021][UnrealROX plus: An Improved
Tool for Acquiring Synthetic Data from Virtual 3D
Environments],使得在虚拟住宅中通过强化学习分析不同改造布局下服务机器人导航性能成为可行选择。
第四,游戏引擎也广泛用于人类在虚拟空间中的导航和空间感知研究,包括日照与亮度主观感知
[Hegazy 等 2021][Evaluating and visualizing perceptual impressions of
daylighting in immersive virtual environments];[Hegazy 等 2022][An
interactive approach to investigate brightness perception of daylighting
in Immersive Virtual Environments: Comparing subjective responses and
quantitative metrics],复杂封闭空间可达性与舒适性评估 [Guida 和 Leoncini
2021][Regional Aircraft Interiors Evaluation in a Real Time Ray-Traced
Immersive Virtual Environment],以及建筑设计评审与交互 [Behmel 等
2014][MRI Design Review System: A Mixed Reality Interactive Design
Review System for Architecture, Serious Games and Engineering using Game
Engines, Standard Software, a Tablet Computer and Natural Interfaces]
等,表明在同一虚拟住宅环境中可以同时评估“机器人可达性与任务性能”和“居住者空间体验”。
针对家用清洁机器人,[Baek 等 2011][Integrated On-Line Localization,
Mapping and Coverage Algorithm of Unknown Environments for Robotic
Vacuum Cleaners Based on Minimal Sensing] 与 [Lee 等 2011][Sector-based
maximal online coverage of unknown environments for cleaning robots with
limited sensing]
在低成本传感器条件下,提出集成定位、建图与覆盖的在线算法。通过假定家庭空间主要由直交墙体构成,将空间划分为若干“扇区”,在每个扇区内保证高覆盖率,并用覆盖率随时间变化曲线评估清扫性能。[Goel
等 2013][Systematic Floor Coverage of Unknown Environments Using
Rectangular Regions and Localization Certainty]
将未知环境分解为一系列长方形区域,采用摆线式扫描保证系统化地板覆盖,同时跟踪定位不确定度,在标准测试环境与多房间住宅中对比总行驶距离和漏扫面积。
从“完全覆盖路径规划”(Complete Coverage Path Planning,
CCP)的视角,[Aydemir 等 2023][Complete coverage planning with
clustering method for autonomous mobile robots]
指出传统栅格法将“部分被障碍占据的栅格”视为完全不可通行,从而低估可覆盖面积、降低实际覆盖率。作者提出
Km++CCP 方法,先用 K-means++
对可通行空间聚类,将聚类中心作为路径节点,在多组仿真与 36
组室内实测中实现比栅格法更高的室内覆盖率。[Köroglu 等 2019][Design of an
Autonomous Effective Area Scanning Robot] 则在未知室内场景中结合
SLAM、区域分割与
CCPP,构建行为状态机,以总覆盖率、重复访问率和完成时间综合评价“有效区域扫描”。
部分研究强调边界与角落覆盖的重要性。[Kim 等 2013][Topological Graph
Based Boundary Coverage Path Planning for a Mobile Robot] 与 [Kim 等
2012][Boundary Coverage Path Planning for Modeling of Building
Interiors] 提出基于拓扑图和 Euler
回路的边界覆盖算法,通过构造“膨胀障碍物”并沿其边界行驶,使机器人在保持一定安全距离的前提下获得高质量墙面与地面信息。相关实验以边界覆盖完整性和总行驶里程为主要指标。
在路径几何方面,[Ramesh 等 2022][Optimal Partitioning of Non-Convex
Environments for Minimum Turn Coverage Planning]
将室内覆盖建模为“最小转弯覆盖”问题,通过线性规划在非凸环境中实现对空间的最优矩形分区,使覆盖线条数量最少,从而同时减少转弯次数和路径长度,并以转弯次数、路径总长和覆盖完整性作为评价指标。[Janchiv
等 2011][Complete Coverage Path Planning for Multi-Robots Based on…]
在多机器人清扫中采用细胞分解与重心排序,强调以转弯次数、工作时间与能耗之比衡量算法性能。
在容量约束情形下,[Agarwal 和 Akella 2022][Area Coverage With
Multiple Capacity-Constrained Robots]
将多机器人覆盖问题转化为线覆盖与容量约束路径问题。容量可由电池或作业时间刻画,路径被拆分为“作业行驶”(servicing)和“空驶”(deadheading)两类,分别计算其距离与资源消耗,由此构建更贴近实际的覆盖代价指标。[Giang
等 2024][BWave framework for coverage path planning in complex
environment with energy constraint]
在已知复杂环境中引入电量限制与“陷阱区域”优先级,预计算从充电站出发的最短路树矩阵,用于验证任一位置在剩余电量下是否可以安全返回,并显著降低总路径长度、运行时间与死锁次数。
在多机器人协同与特定应用场景中,[Govindaraju 等 2023][Optimized
Offline-Coverage Path Planning Algorithm for Multi-Robot for Weeding in
Paddy Fields]
针对农田除草任务提出多机器人离线覆盖算法,以单机器人最优覆盖为基线,比较不同队列规模下单位机器人的平均行程与重复覆盖率。尽管场景为农田,但其评价方法(单位机器人路径长度、重复率、路径均衡性)完全可以迁移到室内多机器人协同清扫与巡视。
在未知或动态环境下,[Saha 等 2021][Online Area Covering Robot in
Unknown Dynamic Environments]
采用深度强化学习应对含动态障碍的未知环境覆盖,与基于动态重规划的改进 A*
相比,在达到类似覆盖率的条件下明显减少总步数与重复率;[Mitra 和 Saha
2024][Online On-Demand Multi-Robot Coverage Path Planning]
提出“按需重规划”的中心化多机器人覆盖算法,仅对完成上一轮路径的机器人重新规划,在多种基准地图上证明该方法在保证完全覆盖的前提下显著降低整体规划时间和总行程。
此外,部分巡逻与监控类任务从时间维度来刻画覆盖质量,例如 [Portugal
和 Rocha 2013][Distributed multi-robot patrol: A scalable and
fault-tolerant framework]
在多机器人巡逻问题中,通过最大重访时间、平均访问间隔和访问次数分布等指标综合评价空间的时序覆盖性能。
在典型居家监控场景中,[Mehdi 和 Berns 2016][Autonomous Determination
of Locations for Observing Home Environment Using a Mobile Robot]
通过自动选取有限个“关键观察位”,使机器人在保持与障碍安全距离的前提下获得最大可见面积;以“地面可见覆盖率”和观察点数量为主要指标,在真实公寓环境中实现高达
96%
的面积可见覆盖。这一工作将“位置可达性”与“视野覆盖率”明确区分,为后续在住宅中定义“可观察可达性”提供了基础。
针对室内消杀,[Chio 等 2023][Design and Autonomous Navigation of a
New Indoor Disinfection Robot Based on Disinfection Modeling]
将空气与表面消毒过程与机器人导航路径耦合,构建基于过氧化氢扩散模型的“消杀覆盖率”指标,即空气与表面病原体浓度在全空间降至阈值以下,并以此反推机器人在各功能空间的停留时间与路径设计。
在 3D 建模与视点规划方面,[ELzaiady 和 Elnagar 2017][Next-Best-View
Planning for Environment Exploration and 3D Model Construction]
从占据栅格和 RGB-D
视锥出发,为每个候选视点估计可增加的未知体素量与模型覆盖质量,用“可见未知体素数量”“预期重叠度”与“导航可行性”综合定义
Next-Best-View 的收益。[Sasongko 和 Miura 2019][An Integrated Planning
of Exploration, Coverage, and Object Localization for an Efficient
Indoor Semantic Mapping]
则将几何覆盖、前沿探索与目标物体定位统一在同一视点规划框架内,并用语义地图中已标注物体比例和未覆盖区域比例评价“语义覆盖率”与路径效率。
在专门针对建图质量的工作中,[Eldemiry 等 2022][Autonomous
Exploration of Unknown Indoor Environments for High-Quality Mapping
Using Feature-Based RGB-D SLAM]
指出,传统前沿探索多以面积覆盖与时间为唯一指标,忽略基于低成本 RGB-D
传感器的 SLAM
建图质量。作者将纹理丰富度、可匹配特征数量、回环机会等因素纳入探索策略,采用轨迹误差、地图信息熵、重建稠密度等多项指标综合评价,结果表明在低纹理室内环境中可以在保持覆盖率的同时显著提升地图质量并缩短探索时间。[Roggeman
等 2017][Autonomous exploration with prediction of the quality of
vision-based localization]
则在模型预测控制框架中显式考虑视觉里程计可用特征数量与预期定位误差,避免机器人进入“视觉定位可靠性过低”的区域,提高了探索过程中的定位鲁棒性。
此外,[Tao 等 2023][Glass Recognition and Map Optimization Method
for Mobile Robot Based on Boundary Guidance]
针对玻璃等透明材料导致的虚假“可达区域”问题,提出基于边界引导的室内玻璃识别与地图优化方法。文中以玻璃识别准确率以及规划地图上错误覆盖冗余面积的降低幅度作为指标,两组室内测试场景中错误覆盖冗余分别减少约
60% 与
56%。这说明在评价覆盖率时,除了“漏扫区域”,还应关注“错误覆盖区域”的识别与剔除。
从上述工作可以看出,在狭窄复杂的住宅中,评价“可达性”时有必要引入以下扩展维度:一是障碍、家具与人体的可见性覆盖率;二是
SLAM
地图精度和特征密度等建图质量;三是对透明材质、镜面等高风险“假自由区”的识别与修正能力。
在多机器人面积覆盖与探索方面,[Miah 和 Knoll 2018][Area Coverage
Optimization Using Heterogeneous Robots: Algorithm and Implementation]
在前期理论工作的基础上,用异构机器人团队在平面空间中执行覆盖优化。环境中“重要性”由标量密度场表达,以密度加权覆盖函数作为目标,通过
Voronoi
割与质心控制律,使机器人最终空间布置逼近最优;实验证明在真实室内环境中能够提高加权覆盖性能。[Miah
等 2016][On the Implementation of Area Coverage Optimization using
Mobile Robots] 则使用多台 P3-DX
机器人在室内环境中实现该算法,并通过最终覆盖函数值与收敛速度评价多机器人覆盖质量。
在多机器人探索与地图合成方面,[Araújo 和 Nascimento
2022][Multi-robot Autonomous Exploration and Map Merging in Unknown
Environments]
要求多台机器人在未知室内环境中同时探索并合并局部地图,以全局占据图中已探索区域比例和探索完成时间为主要指标,验证了所提多机器人
SLAM 协同框架的有效性。[Latif 和 Parasuraman
2024][Communication-Efficient Multi-Robot Exploration Using
Coverage-Biased Distributed Q-Learning] 在分布式 Q-learning 框架下提出
CQLite 方法,仅在发现新前沿时共享更新的 Q
值,大幅降低通信开销。在多机器人室内探索仿真中,CQLite
在维持甚至提升覆盖速度与地图质量的前提下,将通信量和计算量降低一半以上。
在通信与网络层面,“覆盖”通常指无线信号覆盖与链路可靠性。[Reich 等
2012][Maintaining Communication Links Using a Team of Mobile Robots] 和
[Reich 等 2011][Connectivity Maintenance in Mobile Wireless Networks via
Constrained Mobility] 提出 SCAN
算法,通过局部拓扑信息控制移动节点停留或继续移动,以保持物理层网络连通性。其在复杂室内环境中的机器人试验表明,系统在超过
99% 的时间内保持全网连通,同时覆盖显著空间范围。[Haxhibeqiri 等
2018][Flexible Wi-Fi Communication among Mobile Robots in Indoor
Industrial Environments] 与 [Behera 等 2018][Wireless Characteristics
Study for Indoor Multi-Robot Communication System]
在工业车间与多机器人系统中,通过实测与仿真分析 Wi‑Fi
链路的覆盖范围、信噪比、包接收率与吞吐量,并研究障碍材质与节点运动对无线覆盖的影响,为将无线质量纳入机器人任务可达性评价提供了经验数据。[Gong
等 2016][Measurement-based wireless network planning, monitoring, and
reconfiguration solution for robust radio communications in indoor
factories]、[Ul Lee 等 2020][An Effective AP Placement Scheme for
Reliable WiFi Connection in Industrial Environment] 等工作,则通过优化
AP 布置与过度部署策略,确保每个位置至少被两个 AP
覆盖,在工厂和复杂室内空间中提高通信覆盖冗余度。
在室内定位基础设施方面,红外、超声和 UWB
等技术通过合理布置锚点或信标,实现一定误差范围内的定位覆盖。[Gorostiza
等 2011][Infrared Sensor System for Mobile-Robot Positioning in
Intelligent Spaces]
通过调相红外信号实现数厘米级定位,并以定位误差与室内覆盖范围为主要指标评估系统性能。[Martín‑Gorostiza
等 2014][Infrared Local Positioning System using Phase Differences]
进一步提出基于相位差的红外本地定位系统,在覆盖–精度–动态响应之间分析权衡。[Gualda
等 2014][Locally-Referenced Ultrasonic - LPS for Localization and
Navigation] 与 [Gualda 等 2019][Simultaneous calibration and navigation
(SCAN) of multiple ultrasonic local positioning systems]
通过多组局部超声定位子系统的协同与自动标定,将大尺度室内空间分割为若干局部参考系,在保证全局覆盖的同时实现较低平均定位误差。[Liu
等 2019][Research on the Positioning Method of Autonomous Mobile Robot
in Structure Space Based on UWB] 与 [Yang 等 2023][Efficient Deployment
of UWB Anchors for Wide-Area Positioning Coverage Using Bipartite Graph]
则围绕 UWB
锚点布置问题,从覆盖面积、无覆盖空洞大小与平均定位误差三个维度评价不同部署策略。
第一,几何可达性与面积覆盖,即以栅格或单元为基础的整体覆盖率、漏扫率与重复覆盖率,并关注特定房间、角落与边界的局部覆盖完整性,这在清洁机器人与边界覆盖路径规划中已有大量实践[Baek
等 2011][Integrated On-Line Localization, Mapping and Coverage Algorithm
of Unknown Environments for Robotic Vacuum Cleaners Based on Minimal
Sensing];[Lee 等 2011][Sector-based maximal online coverage of unknown
environments for cleaning robots with limited sensing];[Aydemir 等
2023][Complete coverage planning with clustering method for autonomous
mobile robots];[Goel 等 2013][Systematic Floor Coverage of Unknown
Environments Using Rectangular Regions and Localization Certainty]。
第二,覆盖效率与代价,即路径长度、转弯次数、任务完成时间、能耗与回充频次,并在多机器人情境下关注任务分配均衡性和重复覆盖率[Ramesh
等 2022][Optimal Partitioning of Non-Convex Environments for Minimum
Turn Coverage Planning];[Agarwal 和 Akella 2022][Area Coverage With
Multiple Capacity-Constrained Robots];[Giang 等 2024][BWave framework
for coverage path planning in complex environment with energy
constraint];[Govindaraju 等 2023][Optimized Offline-Coverage Path
Planning Algorithm for Multi-Robot for Weeding in Paddy Fields]。
第三,观测与建图质量,即对障碍、家具、人体等目标的可见性覆盖率,基于
SLAM
的轨迹与地图误差、可用特征密度与回环质量,以及对玻璃等导致“错误覆盖”的透明材质识别与修正程度[Mehdi
和 Berns 2016][Autonomous Determination of Locations for Observing Home
Environment Using a Mobile Robot];[Eldemiry 等 2022][Autonomous
Exploration of Unknown Indoor Environments for High-Quality Mapping
Using Feature-Based RGB-D SLAM];[ELzaiady 和 Elnagar
2017][Next-Best-View Planning for Environment Exploration and 3D Model
Construction];[Tao 等 2023][Glass Recognition and Map Optimization
Method for Mobile Robot Based on Boundary
Guidance]。第四,时序与任务覆盖,即在巡逻和目标搜索场景中,以最大重访时间、平均访问间隔、目标到达率和到达时间等量化“时间维度的覆盖性”[Portugal
和 Rocha 2013][Distributed multi-robot patrol: A scalable and
fault-tolerant framework];[Tang 等 2017][Robot Path Planning for Human
Search in Indoor
Environments]。第五,通信与定位覆盖,即无线网络覆盖区域、链路可靠性与冗余度,以及定位基础设施的覆盖和误差范围,被视为支撑机器人稳定运行的“隐性可达性”约束[Reich
等 2012][Maintaining Communication Links Using a Team of Mobile
Robots];[Gualda 等 2014][Locally-Referenced Ultrasonic - LPS for
Localization and Navigation];[Yang 等 2023][Efficient Deployment of UWB
Anchors for Wide-Area Positioning Coverage Using Bipartite Graph]。
[Pradeep 等 2018][The Pc metric: a safety performance measure for
evaluation of collision avoidance algorithms] 提出了以碰撞概率为核心的
Pc
安全性能指标,将机器人与人之间的相对运动建模为随机过程,通过估算在给定时间窗内发生碰撞的概率,对不同避障算法进行比较。实验表明,Pc
指标能够在相同行为成功率下区分“高风险高运气”和“低风险稳健”两类策略,是面向人–机共存环境的安全性能评价中更直观的度量。
[Guo 等 2018][Distributed Lyapunov-based model predictive control
for collision avoidance of multi-agent formation]
在分布式模型预测控制框架中引入控制 Lyapunov
函数和速度障碍,将队形跟踪目标写入 Lyapunov
约束,而将避碰目标通过终端约束和不等式约束显式整合到优化问题中,证明了在几乎任意预测时域长度下系统的递归可行性和稳定性。[Sun
等 2023][Safety-Critical Control and Path Following by Formations of
Agents with Control Barrier Functions using Distributed Model Predictive
Control] 则将离散时间控制障碍函数(CBF)约束融入分布式非线性 MPC
中,用对偶性理论将多面体障碍物避让约束转化为可微约束,实现小预测时域下的多机器人编队路径跟随与碰撞避免。
在 ORCA 与模型预测控制融合方向,[Mao 等 2020][A Novel Collision-Free
Navigation Approach for Multiple Nonholonomic Robots Based on ORCA and
Linear MPC] 将 ORCA 给出的期望无碰速度视为参考,引入线性 MPC
以考虑非完整约束和动力学限制,通过将 ORCA 安全区域转化为 MPC
决策变量的线性约束,实现多非完整轮式机器人之间的高效避碰。[Chen 和 Liu
2022][Robust Decentralized Multi Robot Navigation using Tube based Model
Predictive Control and Optimal Reciprocal Collision Avoidance]
则在去中心化管状 MPC 框架下,用 (H_)
滤波器提供状态估计误差上界,并据此收缩 ORCA
可行集,保证在状态不确定性下的鲁棒避碰。
在多机器人目标跟踪与避障一体化方面,[Li 等 2022][Simultaneous
Obstacle Avoidance and Target Tracking of Multiple Wheeled Mobile Robots
With Certified Safety] 与 [Li 等 2024][Distance-and Velocity-Based
Simultaneous Obstacle Avoidance and Target Tracking for Multiple Wheeled
Mobile Robots]
将多机器人目标跟踪与避碰统一在带不等式约束的优化问题中,通过构造以拉格朗日乘子为核心的控制律,将“避免机器人间和环境障碍碰撞”的条件视为主任务,将路径跟踪视为次任务;后续工作引入速度辅助向量和径向界约束,减少不必要的避障动作与停滞现象,并通过
Lyapunov 分析证明了在速度约束下系统的稳定性。
在典型的家庭与室内场景中,[Zhang 等 2022][Effective Safety Strategy
for Mobile Robots Based on Laser-Visual Fusion in Home Environments]
指出二维激光只能看到水平切片,桌面、椅脚等复杂障碍物容易在二维栅格地图上被错误表示,从而导致“路径规划上看似安全、实际存在碰撞风险”。作者通过将深度相机的深度图转换为“伪激光数据”,并与激光地图融合,显著改善了家庭环境栅格地图对障碍物的表示精度,使机器人能够规划出真正无碰路径,在多种静态和动态场景下显著降低实际碰撞事件数,提高导航安全与鲁棒性。
面向人员密集环境的“人感知安全”,[Cai 等 2023][Human-Aware Path
Planning With Improved Virtual Doppler Method in Highly Dynamic
Environments]
提出考虑碰撞风险、社会规范与人群聚集度的综合规划框架,通过高斯混合模型构建动态人群“社会空间”
(g)-space,并在路径规划中显式引入碰撞风险、人舒适与干扰约束,使机器人尽量避开人群团体的近身区域和交互区域。实验结果表明,相比仅优化几何路径的算法,该方法在复杂环境中能够生成更符合人类预期、具有更充足安全距离的避碰路径。
在视觉–语言导航任务中,[Yue 等 2023][Safe-VLN: Collision Avoidance
for Vision-and-Language Navigation of Autonomous Robots Operating in
Continuous Environments] 指出以往连续 VLN-CE
工作几乎不考虑碰撞问题,导致智能体易陷入障碍区域反复碰撞。Safe-VLN
通过引入碰撞场景分类和基于模拟 LiDAR
占据掩膜的路标预测器,避免将路标选在障碍区域,并在发生碰撞后进行路标重选。实验证明,该方法在连续导航任务中显著降低碰撞次数、提高任务成功率,说明在高层任务学习框架中显式嵌入安全模块的重要性。
在拥挤人群导航中,[Xu 等 2023][SafeCrowdNav: safety evaluation of
robot crowd navigation in complex scenes] 提出 SafeCrowdNav
算法,通过设计安全评估函数量化当前场景下机器人所处状态的安全分数,并结合内在探索奖励缓解稀疏回报问题。仿真结果表明,相比多种强化学习基线,该方法能够在复杂人群中获得更低碰撞概率和更短导航时间,从“策略评价与训练过程本身的安全”两方面提升了系统性能。[Nair
等 2022][DynaBARN: Benchmarking Metric Ground Navigation in Dynamic
Environments]
则提供了可系统调整障碍物运动模式(速度、平滑度、加减速特性等)的动态环境基准
DynaBARN,并给出了若干传统与学习型导航系统的基线结果,为今后以统一指标比较不同避碰策略的“动态环境安全性能”提供了标准测试场。
在更广义的人–机协作场景中,大量工作围绕“速度与安全间距”的关系展开。[Lacevic
等 2023][Safe Human-Robot Collaboration via Collision Checking and
Explicit Representation of Danger Zones] 在
ISO“速度与间距监测”范式基础上,引入显式“危险区”表示,实时跟踪人–机间的分离距离,并根据当前速度调整机器人动作,使危险区不与人的占用空间相交,从而在保证安全的前提下最大化机器人速度和生产效率。[Costanzo
等 2022][A Multimodal Approach to Human Safety in Collaborative Robotic
Workcells] 和 [Pupa 等 2021][A Safety-Aware Kinodynamic Architecture for
Human-Robot Collaboration]
则通过多传感器融合与模糊推理调节机器人速度,在满足法规规定最小防护距离的前提下,尽量避免因误检导致的过度停机,提高协作工作站的整体效率。
在移动机器人与人的共行方面,[Buchegger 等 2019][Safe and Efficient
Autonomous Navigation in the Presence of Humans at Control Level]
提出基于 ROS
的预测性、人感知运动控制器,通过预测行人未来位置来优化控制层局部轨迹,并以行程时间、路径长度和与人的最小距离为指标,对人感知导航控制器进行统计对比,证明相较于不考虑人预测的控制器,在保持安全间距的同时显著提高效率。[Song
和 Liu 2024][Collision-Avoidance Control for Human Side-Following
Navigation of an Autonomous Mobile Robot]
针对“机器人侧随行人”任务,基于扩展光线投射构建统一的可视域,以“机器人与人互不失去视线”为原则实时选取最佳侧随位置,实现仅用单线激光即可在室内环境中保持无碰侧随,保障了人–机间的视野和安全距离。
在驾驶安全和主观紧张感方面,[Li 等 2020][Lane-keeping system design
considering driver’s nervousness via scene analysis]
从驾驶者视角提出将相对车道中心的距离和与前车时间间隙差作为关键场景参数,通过场景分析筛选危险车辆并规划平滑的车道保持路径,以减轻驾驶者紧张感。这类以人主观感受为导向的安全间距研究提示,在住宅机器人导航中,除物理安全外,还应关注居民对机器人接近速度与距离的心理阈值。
第一,碰撞风险不应仅以是否发生碰撞或单一最近距离衡量,而应通过路径级风险指标对整条轨迹进行评价,例如
Sobolev 范数[Nair 和 Kobilarov 2011][Collision Avoidance Norms in
Trajectory Planning],碰撞概率 Pc[Pradeep 等 2018][The Pc metric: a
safety performance measure for evaluation of collision avoidance
algorithms],以及 FPR 路径风险[Blake 等 2020][FPR-Fast Path Risk
Algorithm to Evaluate Collision Probability]
等,在规划阶段就对不同候选路径的风险进行排序。
第二,在存在感知和运动不确定性的住宅环境中,应借鉴机会约束与概率安全框架,通过设定不同空间区域的允许碰撞概率上界,在老人活动区域、楼梯口等敏感区域采用更严格的安全约束,在相对可控区域适当放宽,从而在整屋范围内实现“分区安全策略”[Zhu
和 Alonso-Mora 2019][Chance-Constrained Collision Avoidance for MAVs in
Dynamic Environments];[Mustafa 等 2023][Probabilistic Risk Assessment
for Chance-Constrained Collision Avoidance in Uncertain Dynamic
Environments]。
第三,在避碰算法与控制策略选择上,应优先采用具有形式化安全保证的框架,如基于
Lyapunov 函数、控制障碍函数和模型预测控制的一体化方法[Guo 等
2018][Distributed Lyapunov-based model predictive control for collision
avoidance of multi-agent formation];[Sun 等 2023][Safety-Critical
Control and Path Following by Formations of Agents with Control Barrier
Functions using Distributed Model Predictive
Control],并考虑非完整约束和执行器饱和[Mao 等 2020][A Novel
Collision-Free Navigation Approach for Multiple Nonholonomic Robots
Based on ORCA and Linear MPC];[Chen 和 Liu 2022][Robust Decentralized
Multi Robot Navigation using Tube based Model Predictive Control and
Optimal Reciprocal Collision
Avoidance],以保证在狭窄走廊、急转角等“几何裕度较弱”的区域仍能维持安全运行。
第四,在人与机器人共享住宅的情境下,安全评价必须包含人–机间安全间距与主观安全感,可借鉴人感知路径规划、人群导航和协作工作站研究中关于可接受距离、速度–间距关系和危险区的量化方法[Cai
等 2023][Human-Aware Path Planning With Improved Virtual Doppler Method
in Highly Dynamic Environments];[Lacevic 等 2023][Safe Human-Robot
Collaboration via Collision Checking and Explicit Representation of
Danger Zones];[Buchegger 等 2019][Safe and Efficient Autonomous
Navigation in the Presence of Humans at Control
Level],并以此构建适应老年人和儿童感知特点的“住宅内安全距离等级”,例如对床边、卫生间门口、灶台前方等关键区域设定不同的最小安全距离和速度上限。
在面向不确定生产系统的总体框架上,[Garcia 等 2018][Simulation-based
Optimization for Facility Layout Design in Conditions of High
Uncertainty]
通过三项案例研究,总结了在高不确定性条件下开展基于仿真优化的设施布局设计时,概念建模阶段需要重点刻画的系统特征,强调通过对生产系统“变异性类型”的恰当抽象,可以显著减少后续仿真与优化中的不确定性传播。[Zúñiga
等 2020][A Simulation-Based Optimization Methodology for Facility Layout
Design in Manufacturing]
在此基础上提出更完整的方法学,将离散事件仿真与优化算法集成,用以在既有老厂房内改进物料流与设备布局,并借助功能共振分析方法(FRAM)分析不同实施顺序与过程变异性对结果的影响,展示了“方法论
+ 实施细则”的通用框架。
针对动态设施布局问题,[Pourhassan 和 Raissi 2017][An integrated
simulation-based optimization technique for multi-objective dynamic
facility layout problem]
将多目标非支配排序遗传算法(NSGA-II)与仿真模型耦合,在考虑物料搬运成本的同时,用仿真计算“搬运冲突次数”等难以解析建模的指标,从而在多期需求变化情形下求解动态布局方案。[Masoud
等 2019][Simulation based optimization of resource allocation and
facility layout for vegetable grafting operations]
在蔬菜嫁接温室中,将设施布局与人力配置同时作为决策变量,通过嵌入式布局算法与仿真联合优化,使劳动与能源成本日均节约约
20%。[Derhami 等 2020][A simulation-based optimization approach to
design optimal layouts for block stacking warehouses]
以堆垛仓库为对象,综合考虑巷道数、横巷与堆垛深度等几何参数,采用仿真优化同时最小化空间利用与物料搬运成本,给出“布局–运营成本”一体评估的典型范式。
在仓储与拣选系统方面,[Altarazi 和 Ammouri 2018][Concurrent
manual-order-picking warehouse design: a simulation-based design of
experiments approach]
提出并行仿真–试验设计方法,将仓库规模、布局、作业策略与人力/车辆配置同时作为因子,利用仿真获得“SKU
在库周期时间”分布,对比多种设计组合;结果表明传统“串行决策”往往错失全局最优。[Yu
等 2021][The inbound container space allocation in the automated
container terminals]
采用仿真嵌入遗传算法的方法求解自动化集装箱码头入箱堆场的空间分配,使场桥再堆与自动导引车等待时间综合减少,体现了“优化模型
+ 仿真评估”在复杂约束下寻求折中方案的能力。
部分工作进一步将多标准决策与仿真结合。[Nenzhelele 等 2023][MCDM
Model for Evaluating and Selecting the Optimal Facility Layout Design: A
Case Study on Railcar Manufacturing] 通过模糊 AHP–TOPSIS
选出若干候选布局,再利用离散事件仿真评估其吞吐量等定量指标,将仿真结果作为多准则决策的输入,实现“定性–定量”协同。[Atorf
等 2017][A Framework for Simulation-based Optimization Demonstrated on
Reconfigurable Robot Workcells] 与 [Sueldo 等 2025][Simulation-based
metaheuristic optimization algorithm for material handling]
则更加侧重提出通用仿真优化框架,强调在可重构机器人单元与动态物料搬运问题中,通过将仿真环境与多种元启发式算法模块化封装,可以在不中断生产的前提下,对布局与策略进行“离线试错”。
在工业 4.0 与智能工厂背景下,[Choi 和 Kim 2025][Intelligent factory
layout design framework through collaboration between optimization,
simulation, and digital twin]
提出集成混合整数规划、仿真优化与数字孪生的布局设计框架,将装配线平衡、缓冲区设置与整体布局规划串联为多阶段优化–仿真循环,大幅减少人工试错。[Halbwidl
等 2021][Deep Reinforcement Learning as an Optimization Method for the
Configuration of Adaptable, Cell-Oriented Assembly Systems]
探索利用深度强化学习在仿真环境中优化可适应装配单元配置,并与元启发式做对比,指出
RL
在处理“动态重构”问题上具有优势,但在静态布局优化中仍存在效率与收敛性问题。
在住宅与高层建筑能耗方面,[Gan 等 2019][Simulation-based
evolutionary optimization for energy-efficient layout plan design of
high-rise residential buildings] 利用遗传算法与能耗仿真,针对香港一栋 40
层公共住宅,优化不同户型组合和平面布局,以最小化空调与照明能耗;结果表明,算法倾向于利用自然通风与日照,可实现
30%–40% 的运行能耗降低。[Lan 等 2019][A holistic design approach for
residential net-zero energy buildings: A case study in Singapore]
引入“三重底线”(社会–环境–经济)框架,以自然通风与采光利用率、能效与生命周期成本为多目标,对新加坡住宅
NZEB
进行两阶段优化,证明在一定变量范围内,热舒适–采光–能耗–成本并非完全冲突。[Mohammadi
等 2020][Simulation-based design optimization of houses with low grid
dependency] 与 [Mohammadi 等 2019][Simulation-based design optimization
of houses with low grid dependency]
则从电网依赖角度出发,通过仿真优化住宅围护结构、用能与储能规模,在未来电价与补贴情景下寻找“自用率高、对电网依赖低”的设计方案。
在室内空间层面,[Li 等 2022][Research on Optimization of Climate
Responsive Indoor Space Design in Residential Buildings] 基于
Grasshopper、Ladybug 和
Honeybee,提取住宅各功能房间的进深、开间、窗墙比等参数,以室内照度与冷热负荷为目标进行多目标仿真优化,并通过
ANN
建模开展灵敏度分析,为五类典型气候下的住宅户型提出“空间尺度与窗墙比推荐值”。[Almufarrej
和 Erfani 2023][Climate, buildings’ envelope design and energy patterns:
improving energy performance of new buildings in Kuwait] 与 [Manni 和
Nicolini 2022][Multi-Objective Optimization Models to Design a
Responsive Built Environment: A Synthetic Review]
等工作系统梳理了多目标优化在气候响应性外形和围护系统中的应用,显示仿真优化已成为“从体量到室内布局”的重要决策支撑工具。
在行人疏散与安全方面,[Gao 等 2020][Simulation-based optimization of
inner layout of a theater considering the effect of pedestrians]
采用扩展元胞自动机模型,对中型剧院不同过道布局方案进行仿真,并在模型校准后,通过改变侧向出口位置寻找整体疏散时间最小的布局,发现仅将侧向出口上移约
1.6 m 即可显著缩短总疏散时间。[Lian 等 2023][Pedestrian Simulation on
Evacuation Behavior in Teaching Building of Primary School Emergencies
and Optimized Design] 基于 AnyLogic
将小学教学楼交通空间参数化,以疏散时间为评价指标优化走廊形式与楼梯宽度,得出“走廊宽度对疏散时间影响远大于楼梯宽度”的定量结论,并由此提出面向规范的设计建议。[Calcagno
等 2021][Reshaping metro station spaces to improve social distancing
during COVID-19 pandemic]
则利用两阶段网络设计与行人仿真模型,为疫情背景下的地铁站改造提供布局重构与人流控制策略,目标是在保持通过能力的同时满足社交距离约束。
在城市块体与室外微气候方面,[Li 等 2024][A study on urban block
design strategies for improving pedestrian-level wind conditions:
CFD-based optimization and generative adversarial networks] 将 CFD
仿真、遗传算法与生成对抗网络(GAN)结合,通过在 GAN
生成的三维街区形态上执行遗传优化,以改善行人高度风环境,最终将三个目标函数分别优化
68.36%、51.74% 和 41.83%,并用岭回归提炼出关键形态指标与设计策略。[Kaseb
和 Rahbar 2022][Towards CFD-based optimization of urban wind conditions:
Comparison of Genetic algorithm, Particle Swarm Optimization, and a
hybrid algorithm] 系统比较遗传算法、粒子群与混合算法在街道尺度 CFD
优化中的性能,表明混合算法在改善风条件方面相对 GA、PSO 有显著优势。[Hao
等 2021][Design Optimization of Dense Urban Neighbourhood with
Computational Simulation and Genetic Algorithm for Improving Outdoor
Thermal Environment] 则将 CityComfort+
热舒适模拟与遗传算法耦合,对高密街区开放空间组合进行优化,提升户外热舒适面积比例。
值得注意的是,部分工作已经开始采用点云和真实数据驱动的迭代设计。[Urech
等 2022][A simulation-based design framework to iteratively analyze and
shape urban landscapes using point cloud modeling]
利用激光点云重建城市景观,在此基础上构建体素与网格模型,并将 CFD
模拟结果赋予点云,形成“以点云为基底、性能参数为属性”的迭代设计流程,实现对不同景观配置的性能比较。[Jiang
等 2023][A multilayer perceptron-based fast sunlight assessment for the
conceptual design of residential neighborhoods under Chinese policy]
通过多层感知机学习官方日照模拟软件的结果,将原本需要重复遮挡计算的冬至日日照评估,在精度
96.5%–98% 前提下,将计算时间缩短至
1/84–1/50,并在此基础上进行小区布局优化,演示了“机器学习 +
仿真优化”在大尺度住宅布局中的加速潜力。
在采样策略方面,[Liu 等 2024][Surrogate-based drag optimization of
Autonomous Remotely Vehicle using an improved Sequentially Constrained
Monte Carlo Method]
针对具有复杂约束的船舶布置优化,引入顺序约束蒙特卡洛(SCMC)采样方法与“最大最小距离”准则,在不规则设计空间内实现渐进、均匀采样,构建克里金代理模型,再用于水动力阻力优化。结果表明,该方法在样本数大幅减少的情况下,仍能达到与常规设计实验方法相当乃至更高的精度。[Burghignoli
等 2022][Adaptive RBF with hyperparameter optimisation for aeroacoustic
applications] 与 [Koziel 和 Pietrenko-Dabrowska 2020][Rapid Optimization
of Compact Microwave Passives Using Kriging Surrogates and Iterative
Correction] 通过自适应 RBF
与克里金模型迭代校正,在气动声学与微波器件布局优化中显著减少直接仿真次数。
在多物理、多尺度仿真中,[Albanesi 等 2018][A metamodel-based
optimization approach to reduce the weight of composite laminated wind
turbine blades] 采用 ANN
代理与遗传算法相结合,对风机叶片叠层布局进行优化,在保证强度与振动约束的前提下减重约
20%,同时计算成本降低 40%;[Albanesi 等 2018][Simultaneous ply-order,
ply-number and ply-drop optimization of laminate wind turbine blades
using the inverse finite element method]
进一步将铺层顺序、数量与收缩位置作为决策变量,通过逆有限元与遗传算法联合优化,实现形状–结构的协同设计。
在强耦合“布局–连通”问题上,[Jessee 等 2020][Simultaneous Packing and
Routing Optimization Using Geometric Projection] 与 [Bello 等
2024][Multi-Physics Three-Dimensional Component Placement and Routing
Optimization Using Geometric Projection]
提出几何投影驱动的三维拓扑优化框架,同时优化器件位置与连通管线的路径与截面尺寸,并在热–流体等多物理约束下最小化系统体积。[Peddada
等 2022][Toward Holistic Design of Spatial Packaging of Interconnected
Systems With Physical Interactions (SPI2)]
进一步提出“SPI2”整体空间封装设计愿景,认为现有设计流程往往将结构、连通与物理行为割裂,无法有效探索庞大设计空间,主张通过统一的仿真–优化平台实现“形式–行为”一体化求解。
在城市与社区尺度,[Rakha 和 El Kontar 2019][Community energy by
design: A simulation-based design workflow using measured data
clustering to calibrate Urban Building Energy Models (UBEMs)]
以及其早期会议版本[Rakha 和 El Kontar 2018][Calibrated Urban Systems
Design A Simulation-based Design Workflow using Measured Data Clustering
to Calibrate Urban Building Energy Models
(UBEMs)],通过电器级用电数据聚类获得住户行为模式,用以校准
UBEM,并在此基础上评估不同城市设计情景对社区能耗的影响。[Echeverria 等
2023][Quantifying the financial value of building decarbonization
technology under uncertainty: Integrating energy modeling and investment
analysis]
将能耗建模与不确定下投资分析结合,通过蒙特卡洛模拟未来能源价格、碳罚款与绿建溢价情景,量化不同电气化策略在
10 000 种情形下的财务收益,为建筑去碳化技术提供决策支持。
在暖通系统改造方面,[Kabbara 等 2023][Heuristic optimization for
designing centralized air distribution systems in non-residential
buildings] 与 [Kabbara 等 2024][Simulation-based optimization method for
retrofitting HVAC ductwork design]
提出基于仿真与元启发式的集中空调风管布局与尺寸优化方法,在复用既有风管的前提下,以全寿命成本与舒适性为目标进行自动搜索,在学校建筑案例中分别实现约
13.6% 与 17%
的寿命周期成本降低,体现了“在既有约束下的布局再设计”思路。
在应急场景中,[Khoshkenar 等 2017][SIMULATION-BASED DESIGN AND
TRAFFIC FLOW IMPROVEMENTS IN THE OPERATING ROOM]
通过对手术室视频数据进行编码,建立细致的多主体行走与交互模型,用仿真比较不同床位朝向与设备布置下医护行走距离与碰撞次数,从而提出“仅通过旋转病床”等低成本改造即可显著优化交通流。这一“录像–行为建模–仿真–调整布局”的闭环,与住宅中基于实测行为与机器人轨迹进行布置优化高度类似。
在点云驱动的空间塑形方面,[Urech 等 2022][A simulation-based design
framework to iteratively analyze and shape urban landscapes using point
cloud modeling]
已被前文提及,其关键贡献在于将激光点云不仅作为静态几何底图,而是通过体素化与
CFD
仿真,将风场等性能指标直接附着在点云上,使设计师可以在同一坐标系中迭代修改地形与植被配置,并即时对比不同方案的性能。这种“以点云为载体、以仿真为反馈”的设计流程为老旧住宅场景提供了直接范式:用室内扫描获得几何与家具信息,在统一环境中进行布局调整与机器人仿真,并以性能指标驱动方案筛选。
其一,制造业与物流系统中的仿真–优化设施布局方法已经证明,在复杂、多约束空间中,可以通过“仿真评估
+ 元启发式/强化学习搜索”系统探索布局方案空间[Garcia 等
2018][Simulation-based Optimization for Facility Layout Design in
Conditions of High Uncertainty];[Zúñiga 等 2020][A Simulation-Based
Optimization Methodology for Facility Layout Design in
Manufacturing];[Pourhassan 和 Raissi 2017][An integrated
simulation-based optimization technique for multi-objective dynamic
facility layout problem];[Derhami 等 2020][A simulation-based
optimization approach to design optimal layouts for block stacking
warehouses]。若将“生产线–物料–设备”替换为“房间–家具–机器人”,同样可以在保证通行安全与人居需求前提下,优化门洞宽度、通道走向与家具摆放。
其二,建筑与城市领域已形成以多目标优化为核心的仿真驱动设计工作流,从单体住宅能耗、NZEB,到高层住宅平面组合、室内空间尺寸与开窗比例,再到街区风环境、户外热舒适与疏散性能[Gan
等 2019][Simulation-based evolutionary optimization for energy-efficient
layout plan design of high-rise residential buildings];[Lan 等 2019][A
holistic design approach for residential net-zero energy buildings: A
case study in Singapore];[Li 等 2022][Research on Optimization of
Climate Responsive Indoor Space Design in Residential Buildings];[Gao
等 2020][Simulation-based optimization of inner layout of a theater
considering the effect of pedestrians];[Lian 等 2023][Pedestrian
Simulation on Evacuation Behavior in Teaching Building of Primary School
Emergencies and Optimized Design];[Li 等 2024][A study on urban block
design strategies for improving pedestrian-level wind conditions:
CFD-based optimization and generative adversarial
networks],均表明设计变量与性能指标的参数化是实现闭环的前提。这为本文构建“平面尺度–门洞净宽–通道宽度与转弯半径–家具布置”等参数化住宅模型提供了直接借鉴。
其三,高成本仿真场景下,通过克里金、RBF、ANN
等代理模型与高效采样框架,可在有限仿真预算内完成多轮优化迭代[Liu 等
2024][Surrogate-based drag optimization of Autonomous Remotely Vehicle
using an improved Sequentially Constrained Monte Carlo Method];[Koziel
和 Pietrenko-Dabrowska 2020][Rapid Optimization of Compact Microwave
Passives Using Kriging Surrogates and Iterative Correction];[Albanesi
等 2018][A metamodel-based optimization approach to reduce the weight of
composite laminated wind turbine blades]。对于以 Unreal / Unity
为核心的具身机器人仿真,由于单次仿真时间较长、变量维度高,有必要引入类似的代理–优化–再仿真分层架构,以保证布局搜索的可行性。
其四,越来越多的工作采用点云、实测能耗与行为数据校准模型,形成“数据–仿真–设计–再数据”的真正闭环[Rakha
和 El Kontar 2019][Community energy by design: A simulation-based design
workflow using measured data clustering to calibrate Urban Building
Energy Models (UBEMs)];[Khoshkenar 等 2017][SIMULATION-BASED DESIGN AND
TRAFFIC FLOW IMPROVEMENTS IN THE OPERATING ROOM];[Urech 等 2022][A
simulation-based design framework to iteratively analyze and shape urban
landscapes using point cloud modeling];[Jiang 等 2023][A multilayer
perceptron-based fast sunlight assessment for the conceptual design of
residential neighborhoods under Chinese
policy]。这提示我们,在广州老旧住宅的场景中,可以先利用点云和有限机器人实测轨迹建立与校准仿真环境,再在其中开展布局优化,并在实际改造后继续用机器人运行数据修正模型,从而逐步收敛到兼顾“人–机器人共存性能”和“改造成本”的方案。
首先要实现这个算法,需要对随机的点查询距离以及其几何距离在R内的所有点,即求所谓的R邻域。R邻域算法是KNN(K-nearest
neighbors)算法的一个变形,可以在小于O(n2)的复杂度下求解R邻域。但是为了简单起见,本次复现因为场景点数目不大,所以使用的方法并没有过多考虑效率,实现R邻域的方式是先建立一个
n x n
的二维数组存储所有点两两之间的距离,然后遍历一次二维数组,为所有的点建立一个R邻域列表,该列表中存储了对应点R邻域的索引值,这个列表很有用,下面要介绍的滚球法也利用了这个列表。
>Q = deque() >for key, e in edges.items(): if e.valid and e.etype() == 1and e.length > R: Q.append(key)
>while Q: key = Q.popleft() e = edges.get(key, None) if e isNoneornot e.valid: continue if e.etype() != 1: continue
t_idx = e.adj[0] if t_idx < 0or t_idx >= len(triangles): e.invalidate() continue T = triangles[t_idx] ifnot T.valid:
continue
a, b, c = T.vi
tri_edges = {tuple(sorted((a, b))), tuple(sorted((b, c))), tuple(sorted((a, c)))} other_keys = [ek for ek in tri_edges if ek != key]
for ek in tri_edges: ee = edges.get(ek, None) if ee isNoneornot ee.valid: continue if t_idx in ee.adj: ee.adj.remove(t_idx)
if e.etype() == 0: e.invalidate() else: e.invalidate()
T.valid = False
for ok in other_keys: oe = edges.get(ok, None) if oe isNoneornot oe.valid: continue et = oe.etype() if et == 0: oe.invalidate() elif et == 1and oe.length > R: Q.append(ok)
>boundary_edges = [] >for key, e in edges.items(): if e.valid and e.etype() == 1: boundary_edges.append(e)
>E_lines = [] >E_pairs = [] >for e in boundary_edges: vi, vj = e.i, e.j pa = M.Vertices[vi]; pb = M.Vertices[vj] a3 = rg.Point3d(pa.X, pa.Y, pa.Z) b3 = rg.Point3d(pb.X, pb.Y, pb.Z) E_lines.append(rg.Line(a3, b3)) oi = vidx_to_orig[vi] oj = vidx_to_orig[vj] if oi > oj: oi, oj = oj, oi E_pairs.append((oi, oj))
defstart_index_minY_maxX(pts): # Y 最小,若相同 X 最大 imin = None best = (float('inf'), -float('inf')) # (Y升序, X降序) for i, p inenumerate(pts): key = (p.Y, p.X) if key[0] < best[0] or (abs(key[0]-best[0]) < 1e-15and key[1] > best[1]): best = key imin = i return imin
defbuild_neighbors(pts, R, tol=1e-6): n = len(pts) adjs = [[] for _ inrange(n)] thr = max(R, 0.0) + tol for i inrange(n): pi = pts[i] for j inrange(i+1, n): pj = pts[j] d = dist_xy(pi, pj) if d <= thr and d > tol: # 排除重合点 adjs[i].append(j) adjs[j].append(i) return adjs
defangle_key(origin, direction, pt): vx = pt.X - origin.X vy = pt.Y - origin.Y dx, dy = direction dot = dx * vx + dy * vy crs = dx * vy - dy * vx ang = math.atan2(crs, dot) if ang < 0: ang += 2 * math.pi return ang
defhas_points_in_circle(pts, neighbor_ids, center, r, exclude_idx): # 仅检查同一 R 邻域内的点是否落入圆内 for k in neighbor_ids: if k == exclude_idx: continue if point_in_circle_xy(pts[k], center, r): returnTrue returnFalse
defget_next_point_ball(prev_idx, cur_idx, pts, adjs, r, flags): # 在 cur 的 R 邻域 adjs[cur_idx] 内寻找下一点(滚球法) nbrs = list(adjs[cur_idx]) ifnot nbrs: return -1 sort_neighbors_by_polar(pts, nbrs, cur_idx, prev_idx) pc = pts[cur_idx] for j in nbrs: if flags[j]: continue pj = pts[j] ctr = circle_center_right(rg.Point2d(pc.X, pc.Y), rg.Point2d(pj.X, pj.Y), r) if ctr isNone: continue ifnot has_points_in_circle(pts, nbrs, ctr, r, j): return j return -1
defsuggest_R_by_second_neighbor(pts): # 建议的 R:最大“第二近邻距离”,保证每点至少 2 个 R 邻居 n = len(pts) if n < 3: return0.0 max_second = 0.0 for i inrange(n): pi = pts[i] dists = [] for j inrange(n): if j == i: continue d = dist_xy(pi, pts[j]) dists.append(d) dists.sort() iflen(dists) >= 2: max_second = max(max_second, dists[1]) eliflen(dists) == 1: max_second = max(max_second, dists[0]) return max_second