从二维点集重建平面形状的思考:GHPython实现
前言:从村落平面问题到二维点集重建
意识到这个问题并不是简单的凸包,要从昨天晚上麦同学给出的一个几何问题提起:
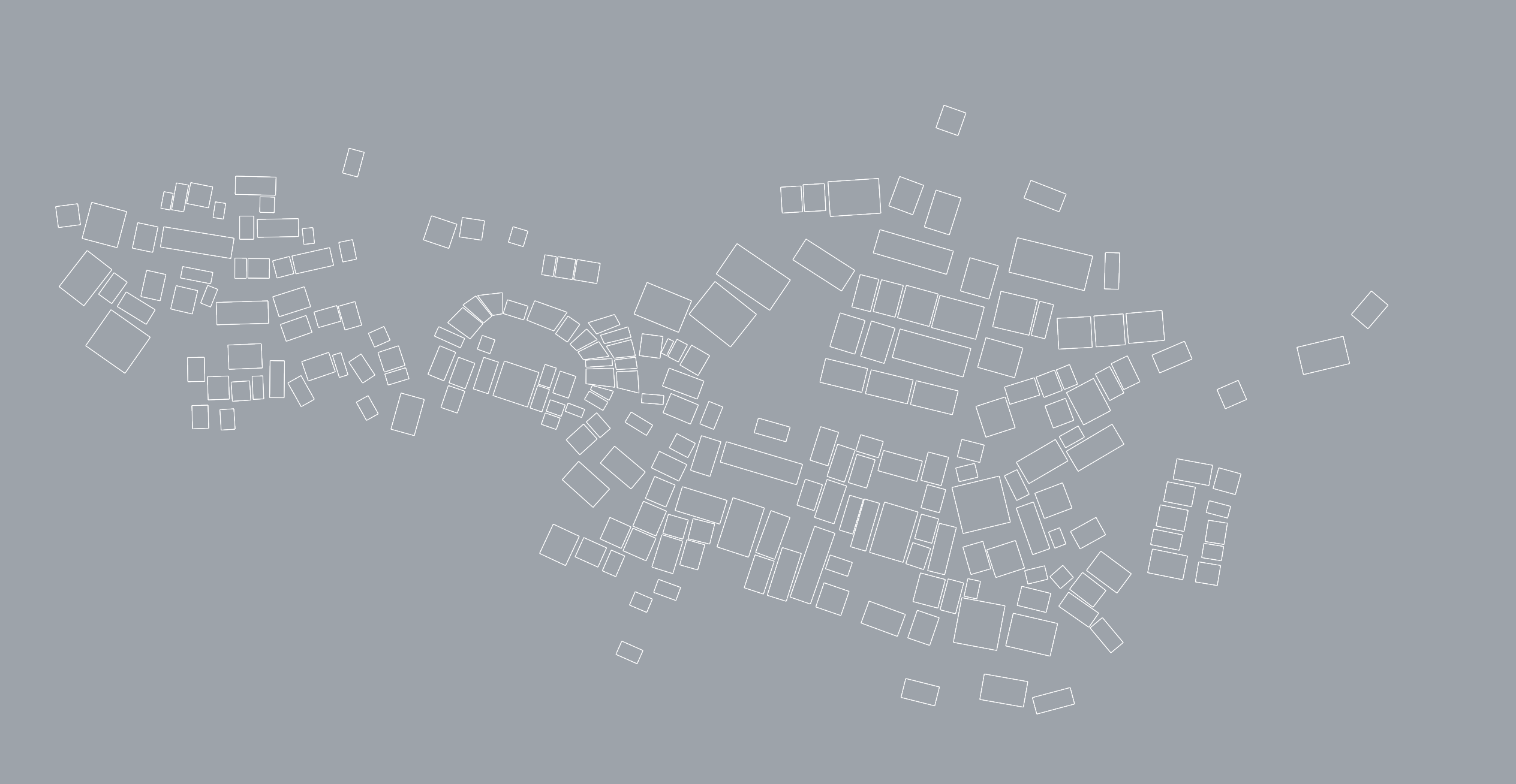
Q:一个村落,如何通过设定一定的阈值,使其生成不同内凹程度的边界包裹?
当我们有一系列点的时候,如何从点集中重建一个合理的集合形状?这个问题在三维点集中存在,但是本问题主要聚焦于平面,将其转化一下,可以将问题变为:
给出平面区域的一系列散点,要求出一定程度上反应这些散点的平面多边形,给出边的连接方式即可。
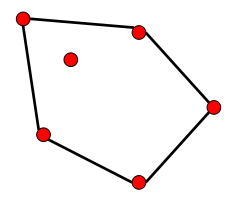
图2 凸包处理和预期效果之间的区别
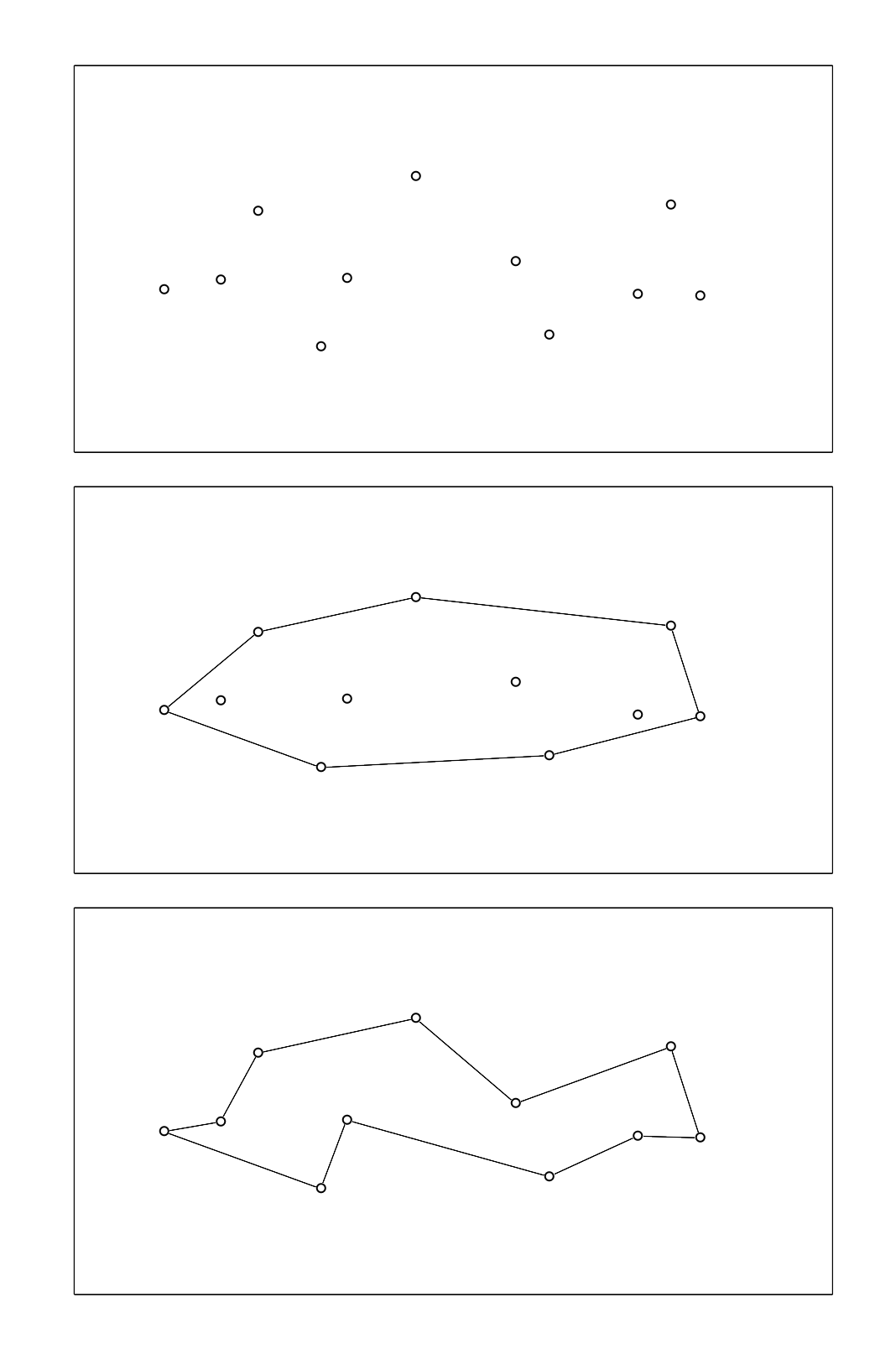
从示意图中可以看到,相较于简单粗暴的「凸包算法」,后者并不局限于出现「内凹」的情况,因此在精准描述轮廓的情况下有更强的适用性。
查阅资料后意识到,诸如此类问题往往存在两种主要类型:
这两种不同的含义是和具体的应用场景相关的。
| 求散点描绘的轮廓 | 求散点分布区域的边界轮廓 |
|---|---|
 |
 |
凹包与Alpha Shape
当前已经有不少集合领域的资料探讨过这类问题的解决方案,但是篇幅有限,此处仅按网友chnhideyoshi提供的思路发散,在GHPython中进行复现。
首先,很多之前了解过算法的人都知道凸包算法,凸包求解的是覆盖所有点的凸多边形,由于限定死了凸多边形,所以凸包显然不是本文想要讨论问题的解决方案。我希望找到的解法不能否定凹陷的部分,因此可以联想到这个问题是否可以被定义为「凹包」。或者说一种广义的参数化的凸包。事实上确实有凹包的概念,英文叫做concave hull(与之对应,凹包被叫做convex hull)。不过由于凸包的情况不同,凹包没有特别明确的定义,给定一个较不规则的点集,可以有各种各样的凹包,但是凸包是唯一确定的。
| 凸包 | 凹包A | 凹包B |
|---|---|---|
 |
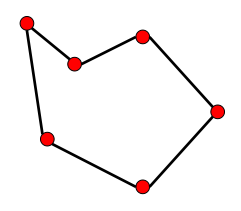 |
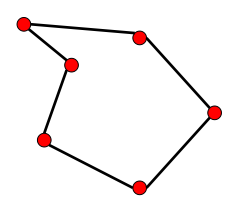 |
在论文
实现方法
基于Delaunay三角化
经常使用grasshopper处理数据的话,一定会熟悉Delaunay来处理点之间的关系问题,例如,我们想要为目标点集使用Delaunay三角化算法,可以得到如下的三角网。
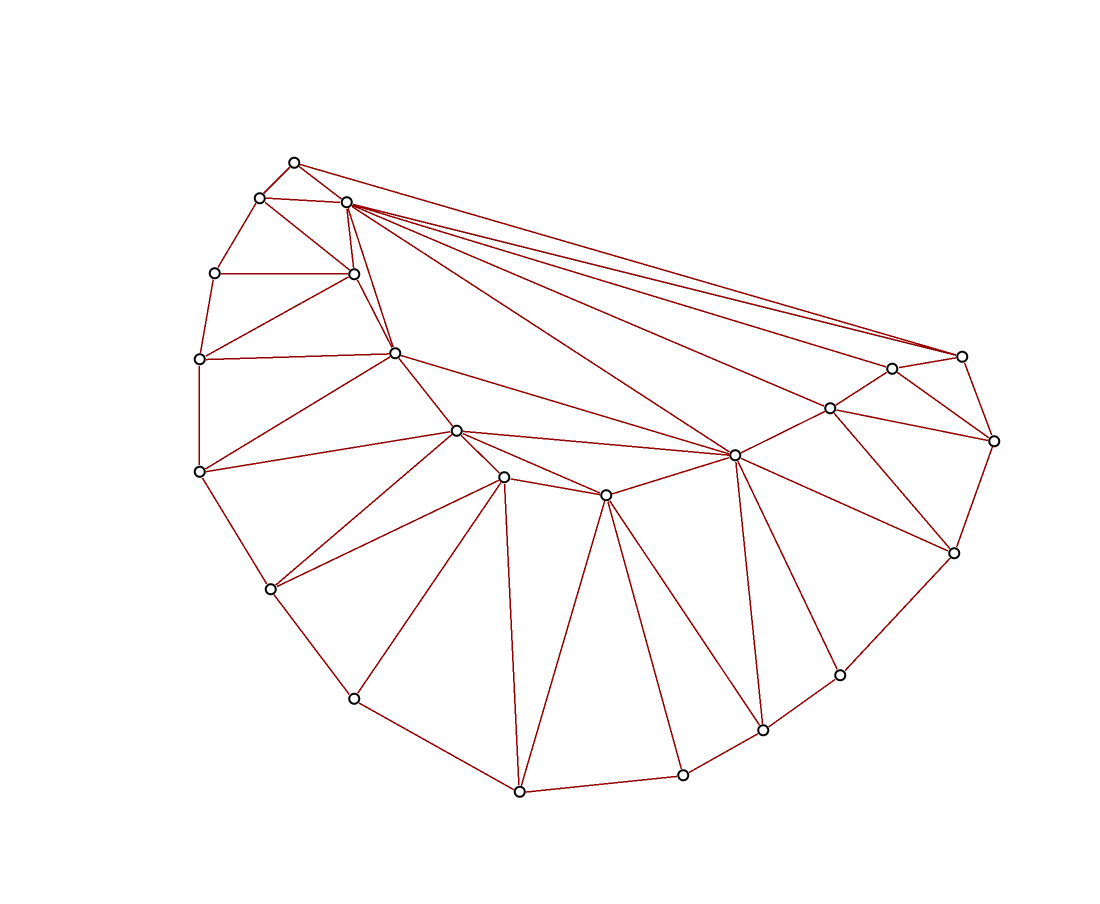
分析得到的三角网,不难想到一个解决方法:因为我们想要求解的形状就是Delaunay三角网的子集,所以我们只需要从所以我们只需要从Delaunay三角网的最外层边开始外不断的删去超过长度限制的边,当这个过程结束时,我们就能够得到一个大致符合我们预期的形状。
所以总结这个思路,输入点集S和长度限制R的求取凹包的列表算法过程如下:
1、为点集S求取Delaunay三角网M,三角网用标准的Mesh形式表示。
2、为M初始化所有的Edge对象,并求取Edge的长度以及邻接三角形集合。其中邻接三角形的边为内部边,1个三角形的为边界边,0个三角形的为计算过程中会退化的边。
3、将所有长度大于R的边界边加入队列,并当队列非空时循环下列过程:
i. 从队列中取出一条边E,得到E的唯一邻接三角形T。
ii. 找到T中另外两个边E1,E2,将它们的邻接三角形集合删去T。
iii. 将E1,E2中新形成的长度大于R的边界加入队列。
iv. 将E置无效标记,若E1,E2有退化的,也置无效标记。
4、收集所有有效的边界边,形成边列表,输出。
图4 Delaunay减边的具体方法
### 滚边法(Edge Pivoting)
这是昨天晚上第一眼看到这个问题时想到的解法,但是实际在角度判断的过程中出现了很多的问题,所以后续查资料才找到实际的解决方案。
这个方案从求凸包的Graham Scan算法衍生出来的一个方法。Graham Scan算法首先找到一个Y的最低点作为起始点,然后使用叉积角度判断的方法判断点的走向,最走在栈内留下凸包的点序列。具体的算法网上有不少现成的资料,在这里就不过多赘述了。而这个方法也是和Graham法从同一个出发点出发,通过扫描角度来确定下一个点。
首先要实现这个算法,需要对随机的点查询距离以及其几何距离在R内的所有点,即求所谓的R邻域。R邻域算法是KNN(K-nearest neighbors)算法的一个变形,可以在小于O(n2)的复杂度下求解R邻域。但是为了简单起见,本次复现因为场景点数目不大,所以使用的方法并没有过多考虑效率,实现R邻域的方式是先建立一个 n x n 的二维数组存储所有点两两之间的距离,然后遍历一次二维数组,为所有的点建立一个R邻域列表,该列表中存储了对应点R邻域的索引值,这个列表很有用,下面要介绍的滚球法也利用了这个列表。
实际上不难理解,假设AB为凹包的一个边,那么其下一个点C必然是在B的R邻域点中选择。我们实现这个算法的关键,就是为AB边找一个合适的C点。这里笔者设想的寻找C的方法使用如下原则:
- 假如B的R领域除了A就只有一个点,那么那个点就是C。
- 以B为圆心从向量BA出发转圈扫描,遇到的第一个点为C。
这里涉及到一个小算法,即所谓的极坐标方向排序问题,这个问题的描述是:给定一个原点P和一个初始方向n,如何为平面上的点集S排序,使得点集中的点P1,P2…PN与P的连接是按从n开始的逆时针排列的。
这个问题搜一搜stackoverflow即得到一个很好的解答,在该帖子里答主给出一个用于比较的函数,一旦有了比较函数,排序也不成问题,这个比较函数在后面的方法中会出现。其具体的比较原理如果对向量的点积叉积有所了解也不难理解。这里不妨提一下点集叉积的结果符号的几何含义:
- 向量a与b的点集结果为一个实数,计算方式是ax * bx + ay * by,满足交换率,为正值代表ab夹角小于90度,为锐角,负值代表夹角大于90度(谈夹角的话是指0-180度范围),为钝角。
- 向量a与b的叉积结果为一个向量,其数值的计算方法是ax * bx − ay * by,不满足交换率,为正值代表向量b处于向量a的逆时针方向(即a逆时针转一个小于180的角能转到b),负值代表向量b处于向量a的顺时针方向(即a顺时针转一个小于180的角能转到b,非要逆时针转则必然超过180度)。
那么找C点的第二条实现的方式就类似于对一个数组找最小值那样,通过比较找到最小的角度,这个有最小角偏向的就是C点。不过遗憾的是这个思路其实是问题的,测试表明对一些点集采用这个方法会有BUG出现。例如当C点出现在BA向量小于90度的方向时,形成的BC边和AB边具有大致相反的方向,会导致下一步的寻点出现逆向,故这个思路不算是一个成功的思路,不过失败是成功之母,它却引出另一个滚球法的思路,相比这个思路具有更好的鲁棒性。
滚球法(Ball Pivoting)
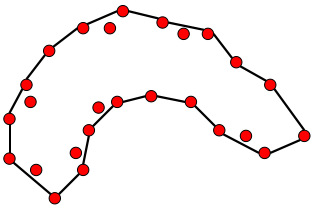
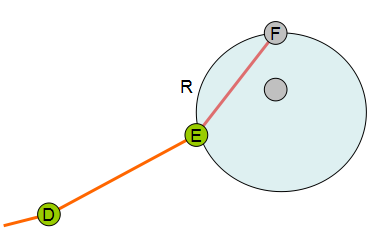
对于任何点集,我们把这些点想象为钉在平面上的钉子。假如拿一个半径大于一定值的球去从边界接近这个钉群,我们可以用这个球在这些钉子群的边界滚一圈,每次滚动,球都能接触到两个钉子而被卡住。
这个思路要求一个合法的R,R太小就没法形成一个闭合的图形。由于我们讨论问题的初衷是要形成一个合适的多边形而不是0个或多个,这样对R的选择就应该有一个限制,太小的R必然出不了结果,这里姑且假设给的R值是合适的。此过程若形成一个多边形,则多变形的最长的边一定小于球的直径。所以算法输入参数为R,意味着拿一个半径为R/2的圆去滚。如下图显示了这个滚球的过程:
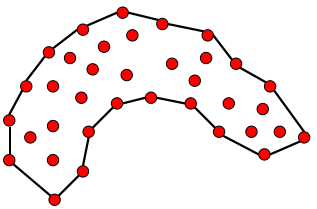
我们不难发现一个性质,即对于任何一次翻滚,假设从弦DE翻转到新弦EF,圆不可能扫过任何的其他点,因为假如扫到其他点,必然会被这个点所卡住,那么新弦就不可能是EF了。这样我们只需对极坐标排序后的E点的R邻域依次寻找符合不覆盖其他点的圆即可。
| 圆在翻滚的时候不能扫到其他点 | 对E的邻域测试圆覆盖情况寻找合适的F |
|---|---|
 |
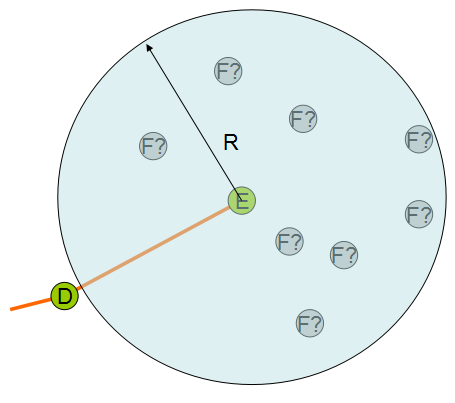 |
这个算法的执行过程和滚边法相似,算法结构都是先找起点,然后循环找下一个点,核心问题也是从DE线段出发寻找新线段EF,而不是再用边去扫描,而是用圆去扫描。分析后归纳出算法的大致步骤:
1、先求凸包那样求出一个Y值最小(Y值相同则取X最大)的点,作为初始点A,此点一定在凹包上。
2、从该点出发,(1,0)作为基准向量,先找一个小于R的边作为初始边,这时这个点即为B,此时一个半径为R/2的圆就卡在了AB上,此时第一个弦AB就找到了。
3、循环后寻找接下来的弦,假设上一条弦位DE,那么下一条弦必然从E开始,连接到E的一个R领域内的点F。寻找F可以使用如下的原则:先对E的R领域的点,以E为中心ED向量为基准进行极坐标方向排序,之后依次为R领域点F0 → FN建立以EFi为弦的圆,然后检查其中是否包含其他F0 → FN的点,若不存在,则EFi即为新弦,则跳出循环。
4、依次找到所有的弦,直到找不到新的弦或遇到以前已经作为弦的点为止。
在R取值合适的情况下,这个过程一定能够给出一个闭合的图形。
## 附录:实际代码
### Delaunay减边法
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
>from collections import deque
>import Rhino
>import Rhino.Geometry as rg
>try:
>import ghpythonlib.components as ghcomp
>except ImportError:
>ghcomp = None
>def xy_key(pt, tol=1e-6):
>"""基于 XY 的 hash key,用于去重和索引映射。"""
>if tol <= 0: tol = 1e-6
>s = 1.0 / tol
>return (int(round(pt.X * s)), int(round(pt.Y * s)))
>def dist_xy(pa, pb):
>"""XY 距离"""
>return math.hypot(pa.X - pb.X, pa.Y - pb.Y)
>def mesh_face_triangles(msh):
>"""将 Mesh 面统一为三角集合,返回列表 [(a,b,c), ...](顶点索引)"""
>tris = []
>fcol = msh.Faces
>for i in range(fcol.Count):
f = fcol[i]
if f.IsTriangle:
tris.append((f.A, f.B, f.C))
else:
# Quad -> 两个三角
tris.append((f.A, f.B, f.C))
tris.append((f.A, f.C, f.D))
>return tris
>class EdgeInfo(object):
>__slots__ = ('i', 'j', 'adj', 'length', 'valid')
>def __init__(self, i, j, length):
if i < j:
self.i, self.j = i, j
else:
self.i, self.j = j, i
self.adj = []
self.length = length
self.valid = True
>def key(self):
return (self.i, self.j)
>def etype(self):
return len(self.adj)
>def invalidate(self):
self.valid = False
self.adj = []
>class TriInfo(object):
>__slots__ = ('vi', 'valid')
>def __init__(self, a, b, c):
self.vi = (a, b, c)
self.valid = True
>def build_delaunay_mesh(points):
>if ghcomp is None:
raise RuntimeError("ghpythonlib.components 不可用。")
>res = ghcomp.DelaunayMesh(points)
>msh = res.mesh if hasattr(res, 'mesh') else res
>if msh is None or not isinstance(msh, rg.Mesh):
raise RuntimeError("DelaunayMesh 生成失败。")
>msh.Normals.ComputeNormals()
>msh.Compact()
>return msh
>def concave_hull_edges_by_threshold(S, R, tol=1e-6):
>if not S or len(S) < 3:
return [], [], None, {"error": "点数量不足"}
>key_to_orig = {}
>unique_pts = []
>for idx, p in enumerate(S):
k = xy_key(p, tol)
if k not in key_to_orig:
key_to_orig[k] = idx
unique_pts.append(p)
>if len(unique_pts) < 3:
return [], [], None, {"error": "去重后点数量不足"}
>M = build_delaunay_mesh(unique_pts)
>vidx_to_orig = {}
>mv = M.Vertices
>for vi in range(mv.Count):
p3f = mv[vi]
p = rg.Point3d(p3f.X, p3f.Y, p3f.Z)
k = xy_key(p, tol)
oi = key_to_orig.get(k, None)
if oi is None:
best_i, best_d = -1, 1e100
for j, sp in enumerate(S):
d = (sp.X - p.X) ** 2 + (sp.Y - p.Y) ** 2
if d < best_d:
best_d = d
best_i = j
oi = best_i
vidx_to_orig[vi] = oi
>tris_idx = mesh_face_triangles(M) # [(a,b,c), ...]
>triangles = [TriInfo(a, b, c) for (a, b, c) in tris_idx]
>edges = {} # (i,j) -> EdgeInfo
>def add_edge(a, b, tri_index):
i, j = (a, b) if a < b else (b, a)
key = (i, j)
if key not in edges:
pa = M.Vertices[i]; pb = M.Vertices[j]
la = rg.Point3d(pa.X, pa.Y, pa.Z)
lb = rg.Point3d(pb.X, pb.Y, pb.Z)
length = dist_xy(la, lb)
edges[key] = EdgeInfo(i, j, length)
edges[key].adj.append(tri_index)
>for ti, (a, b, c) in enumerate(tris_idx):
add_edge(a, b, ti)
add_edge(b, c, ti)
add_edge(a, c, ti)
>Q = deque()
>for key, e in edges.items():
if e.valid and e.etype() == 1 and e.length > R:
Q.append(key)
>while Q:
key = Q.popleft()
e = edges.get(key, None)
if e is None or not e.valid:
continue
if e.etype() != 1:
continue
t_idx = e.adj[0]
if t_idx < 0 or t_idx >= len(triangles):
e.invalidate()
continue
T = triangles[t_idx]
if not T.valid:
continue
a, b, c = T.vi
tri_edges = {tuple(sorted((a, b))), tuple(sorted((b, c))), tuple(sorted((a, c)))}
other_keys = [ek for ek in tri_edges if ek != key]
for ek in tri_edges:
ee = edges.get(ek, None)
if ee is None or not ee.valid:
continue
if t_idx in ee.adj:
ee.adj.remove(t_idx)
if e.etype() == 0:
e.invalidate()
else:
e.invalidate()
T.valid = False
for ok in other_keys:
oe = edges.get(ok, None)
if oe is None or not oe.valid:
continue
et = oe.etype()
if et == 0:
oe.invalidate()
elif et == 1 and oe.length > R:
Q.append(ok)
>boundary_edges = []
>for key, e in edges.items():
if e.valid and e.etype() == 1:
boundary_edges.append(e)
>E_lines = []
>E_pairs = []
>for e in boundary_edges:
vi, vj = e.i, e.j
pa = M.Vertices[vi]; pb = M.Vertices[vj]
a3 = rg.Point3d(pa.X, pa.Y, pa.Z)
b3 = rg.Point3d(pb.X, pb.Y, pb.Z)
E_lines.append(rg.Line(a3, b3))
oi = vidx_to_orig[vi]
oj = vidx_to_orig[vj]
if oi > oj:
oi, oj = oj, oi
E_pairs.append((oi, oj))
>stats = {
"input_points": len(S),
"unique_points": len(unique_pts),
"mesh_vertices": M.Vertices.Count,
"mesh_faces": M.Faces.Count,
"triangles_count": len(triangles),
"edges_total": len(edges),
"boundary_edges_out": len(boundary_edges),
"R": R
>}
>return E_lines, E_pairs, M, stats
>if 'tol' not in globals() or tol is None:
>tol = 1e-6
>try:
>E_lines, E_pairs, M, stats = concave_hull_edges_by_threshold(S, R, tol)
>info = " | ".join(f"{k}: {v}" for k, v in stats.items())
>except Exception as ex:
>E_lines = []
>E_pairs = []
>M = None
>info = "Error: " + str(ex)
滚边法
1 | import math |